
׃�l��֧·����Һλ���ƌ�(sh��)�(y��n)
һ����(sh��)�(y��n)?z��i)��?br /> 1���˽�λ�·����Һλ��ֵ����ϵ�y(t��ng)�ĽY(ji��)��(g��u)�c�M�ɡ�2�����Նλ�·Һλ��ֵ����ϵ�y(t��ng)����������(sh��)��������
3���о����������P(gu��n)����(sh��)��׃����(du��)ϵ�y(t��ng)��(d��ng)�B(t��i)���ܵ�Ӱ푡�
4. �˽�׃�l��Һλ���Ƶ����c(di��n)��
���� ��(sh��)�(y��n)�O(sh��)��
1���^(gu��)�̿��ƾC�ό�(sh��)�(y��n)�b��—PLC����ģ�K
2��Ӌ(j��)��C(j��)��MCGS�M�B(t��i)ܛ��—PLC200���ƌ�(sh��)�(y��n).MCG
3����(sh��)�(y��n)���þ����ɼ��W(w��ng)��һ����
������(sh��)�(y��n)ԭ��
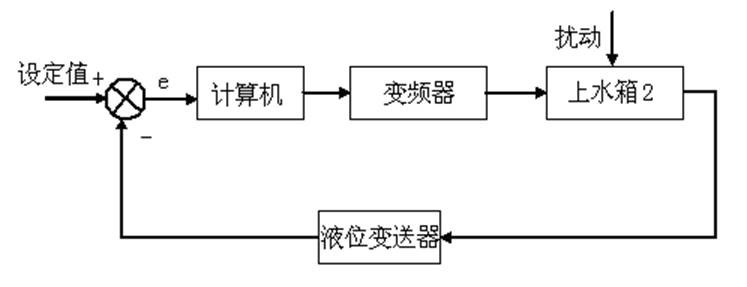
����(sh��)�(y��n)����PLC����,��Һλ�������O(sh��)���߶ȡ�����(j��)��ˮ��Һλ��̖(h��o)LT1ݔ���oPLC��PLC����(j��)P��I��D����(sh��)�M(j��n)��PID�\(y��n)�㣬ݔ����̖(h��o)�o׃�l����Ȼ����׃�l������ˮ�ù�ˮϵ�y(t��ng)��ˮ�������Ķ��_(d��)�������O(sh��)��Һλ�����㶨��Ŀ�ġ�
����ˮ��Һλ�^(gu��)�̿��Ƶķ��Kԭ��D��D��ʾ��
�ġ���(sh��)�(y��n)���E�c��(n��i)��
1���˽⌍(sh��)�(y��n)�b���еČ�(du��)�����̈D��D��ʾ��
2����Ҫ���B�ӌ�(sh��)�(y��n)��(d��o)����ͨӍ����
��PC�c�����_(t��i)�҂�(c��)���PLCͨӍ��“LAN”�þW(w��ng)���B�ӡ�
�ڂ�������̖(h��o)ݔ���^(q��)����ˮ��Һλ��̖(h��o)LT1�˿��Ì�(sh��)�(y��n)���B�ӵ�PLC��AI0��̖(h��o)ݔ��ˣ���ؓ(f��)һһ��(du��)��(y��ng)��
��PLCݔ����̖(h��o)AO1�B�ӵ���(zh��)����������̖(h��o)ݔ��?y��n)^(q��)��׃�l����̖(h��o)ݔ���˿ڣ���ؓ(f��)һһ��(du��)��(y��ng)��
3�����ք�(d��ng)�y�T(m��n)2V1��V3��V4���_(k��i)���P(gu��n)�]2V2��2V3��
4���ȴ��_(k��i)�����_(t��i)���(c��)�Ŀ��Դ�_(k��i)�P(gu��n)����“Start”���o����(d��ng)�O(sh��)�䣬�ٴ��_(k��i)PLC���Ɔ�Ԫ�Դ��
5���ڿ��ư��ϴ��_(k��i)׃�l���Դ�_(k��i)�P(gu��n)��
6����PC���\(y��n)�й���“PLC200���ƌ�(sh��)�(y��n)”��
7���x��ϵ�y(t��ng)�����ˆ��е��Ñ���䛣�����Ñ���
8���M(j��n)�댍(sh��)�(y��n)?z��i)���?y��)�棬�x�� “׃�l��֧·����Һλ���ƌ�(sh��)�(y��n)”��
9������(sh��)�O(sh��)�á�
����Ts=1 ������ֵ��
�O(sh��)��ֵSV=10 ������ֵ��
��������(sh��)Kc=7 ������ֵ��
�e�օ���(sh��)Ti=30 ������ֵ��
�օ���(sh��)Td=0 ������ֵ��
10.�x���Ԅ�(d��ng)���ƣ��ڿ�������ϴ��_(k��i)׃�l������(d��ng)�_(k��i)�P(gu��n)������(d��ng)׃�l����
11����Һλ��(w��n)���ڽo��ֵ��ͨ�^(gu��)���·�ʽ�Ӹɔ_��ͻ������ͻ�p���O(sh��)��ֵ�Ĵ�С��ʹ����һ��(g��)������ؓ(f��)���A�S������׃���� �_��(d��ng)�����������5����15�����ɔ_�^(gu��)��������ˮ����ˮ�����ϵ�y(t��ng)����(w��n)��������ɔ_��ˮ���Һλ���x�_(k��i)ԭƽ���B(t��i)����(j��ng)�^(gu��)һ���{(di��o)��(ji��)�r(sh��)�g��ˮ��Һλ��(w��n)�����µ��O(sh��)��ֵ��ӛ䛴˕r(sh��)��Һλ�O(sh��)��ֵ��
12���քe�m����׃�{(di��o)��(ji��)�x��P��I����(sh��)����Ӌ(j��)��C(j��)ӛ䛲�ͬ����(sh��)�r(sh��)ϵ�y(t��ng)���A�S푑�(y��ng)������
13���քe��P��PD��PID���N����Ҏ(gu��)�ɣ���Ӌ(j��)��C(j��)ӛ䛲�ͬ����Ҏ(gu��)����ϵ�y(t��ng)���A�S푑�(y��ng)������
14����(sh��)�(y��n)��ɺ��c(di��n)���Y(ji��)����(sh��)�(y��n)�˳����P(gu��n)�]׃�l����ͣ�_(k��i)�P(gu��n)�����P(gu��n)�]����(g��)�Դ�_(k��i)�P(gu��n)���γ������팍(sh��)�(y��n)��
�塢��(sh��)�(y��n)��(b��o)��Ҫ��
1����(hu��)��늄�(d��ng)�y����ˮ��Һλ��ֵ���ƌ�(sh��)�(y��n)�ĽY(ji��)��(g��u)��D��
2���Ì�(sh��)�(y��n)�����_�������������P(gu��n)����(sh��)����(xi��)�������^(gu��)�̡�
3�����^��ͬPID����(sh��)��(du��)ϵ�y(t��ng)�����ܮa(ch��n)����Ӱ푡�