
�˹����܌��I�������һ�����T�����о����_�l�͑����˹����ܼ��g�Ĉ�������ͨ������˸�����Ӌ��C�����Iܛ�������������C���˵����M�O�䣬������ˆT�͌W���ṩ��һ�����õČ��h����
���˹����܌��I������У������M�и��N�c�˹��������P���о��͌�����C���W������ȌW������Ȼ�Z��̎����Ӌ��Cҕ�X�����ܿ��Ƶ��I����о����@Щ�о�ּ���Ƅ��˹����ܼ��g�İlչ������˹�����ϵ�y�����ܺ����ܻ�ˮƽ��
���⣬�˹����܌��I�����߀�Г������B�˹������I���˲ŵ���Ҫ�΄ա�ͨ�^����ҵĽ̌W�͌��`��ӣ��W�����������˽��˹����ܼ��g��ԭ���͑��ã��������P�ļ��ܺ�֪�R����δ�����I�lչ���Ԍ��Ļ��A��
�ڿƼ��w�ٰlչ�Ľ��죬�˹����ܣ�AI���ѽ���u�B���҂�����ķ������棬�����ܼҾӵ��Ԅ��{���t���\�ൽ����Ͷ�Y���o��չ�F���䏊��ĝ����͏V���đ���ǰ�������˸��õ��Ƅ��˹������I��İlչ�����B�����|�Č��I�˲ţ������У���о��C�������������˹����܌��I����ҡ�
�˹����܌��I������nj����о��˹����ܼ��g�͑��ö��O���Ŀ���ƽ�_�������о����ṩ��һ���߶Ȍ��I���Č��h���������ͨ����������M��Ӳ���O�䣬�������Ӌ��C��������������оƬ�ȣ��Լ��S����ܛ���YԴ������N�㷨�졢�_�l���ߡ�ģ�M����ƽ�_�ȡ��@ЩܛӲ���YԴ���о����ṩ�ˏ���ļ��g֧�֣�ʹ�������܉���ӌ�ע���˹����ܵĄ����о���
���˹����܌��I������У��о��߂����@�˹����ܵĺ��ļ��gչ�_�����о�����C���W������ȌW������Ȼ�Z��̎����Ӌ��Cҕ�X�ȡ���������̽���µ��㷨��ģ�ͺ���Փ��Ŭ������˹����ܵ����ܺ�Ч�ʡ�ͬ�r�������߀�e�O�_չ��W�ƺ������cӋ��C�ƌW�����W������W������W���I����о��߹�ͬ̽���˹����ܵ�δ���lչ����
���˻��A�о����˹����܌��I�����߀�Г����˲����B���΄ա�����Ҟ鱾�������о������ṩ���S���Č��`�C���������ڌ��H�Ŀ��呟�������Լ��ļ��ܡ�ͨ�^���c����ҵ��о��Ŀ���W�����܉������˽��˹����ܵ�ԭ���͑��ã����B�Լ��Ą���˼�S�͌��`������ͬ�r�������߀�����e�k�W�g�v������ӑ���Ȼ�ӣ��鎟�����ṩһ�������͌W����ƽ�_��
�˹����܌��I����ҵĽ����Ͱlչ�����Ƅ��˹������I��İlչ������Ҫ���x�������H���о����ṩ��һ����Ч����ݵĿ��Эh����߀���˲����B�̈́����`�ṩ������֧�֡��S���˹����ܼ��g�IJ����M���͑����I��IJ�����չ���҂������������˹����܌��I����Ҍ���δ���l�]������Ҫ�����á�
�˹��������ɞ���һ݆�a�I׃��ĺ����������Ƅӽ���������I��Ĕ��ֻ����W�j�������ܻ������S�����˹������ѽ��ɞ��������Ҹ��������S�o���Ұ�ȫ���ش���ԡ�������m���_�ˡ�“���W+”�˹����������Єӌ�ʩ��������������Ժ�P��ӡ�l��һ���˹����ܰlչҎ����֪ͨ���������M��һ���˹����ܮa�I�lչ�����Є�Ӌ����2018-2020�꣩����һϵ���˹����ܮa�I�lչ���ߣ����������˹������Ȱl���ݣ��ӿ콨�O�����͇��Һ�����Ƽ�������
��һ���˹�������غͮa�I�lչ���m���٣�����Ͷ�Y�C�������˹����ܡ������P���I�˲ŵ�����Ҳ�������L���������粿�y�㣬�҇��˹������˲�Ŀǰȱ�ڳ��^500�f�����ȵĹ��������1��10�������������ʧ�⡣����ӏ��˹����ܡ��������W�˲����B���a�R�˲Ŷ̰壬�LJ��ҽ����Į���֮����
��У�˹����܌��I�˲ŵ����B߀̎�ڳ����A�Σ��]�г���Ľ����Խ��b���WУҲ���R���Yȱ�� �����`�l�����߂��ͻ�����}����˘������I�ԏ���ͨ���ԏ����߿��á��߿ɔUչ���n�̺͌���YԴ�S�����˹����܌���ң�ȫ��λ֧���˹��������P���I�̌W�������˼����л����Ŀǰ�WУ���˹������˲����B�Ƕ�Ҫ��Q����Ҫ���}��
�������OĿ��
1.�M����A�̌W���������Ч֧���˹����ܻ��A�n�����I�����n���x���n�Č��̌W��
2.�M���ИI��Ӗ�Ľ̌W������Ч֧���˹����ܑ��Ì��`�������{�Ì��`�����ܙC���ˑ��Ì��`��5G߅��Ӌ�㑪�Ì��`
3.�M���˹����ܵ��͑���ʾ���������˹������J֪�����ͻ����w��ṩʾ�����g��

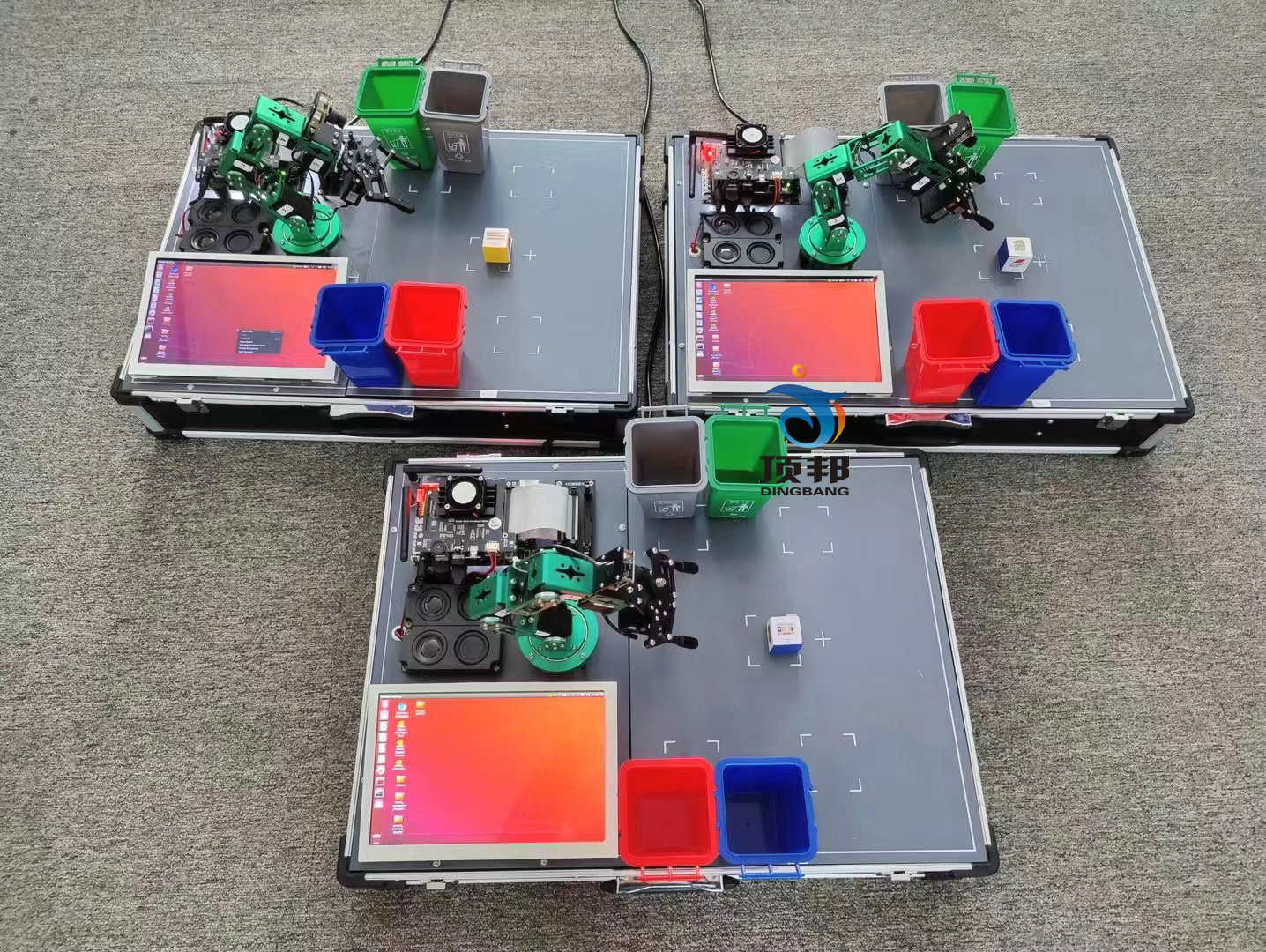
AI�˹������漰��֪�R���^�V韣���Ҫ���^���Ĕ��W���A�����̻��A�����P��Ƕ��ʽ�_�l������Ŀǰ���еĕ������߮aƷ��Ҫô�^����Փ���������҂������T���ŗ���Ҫô�_�l�^�ڏ��s���]�л��A���˅s��ֹ�����C�����V�҂��_�l��ȫ�µ�DB-SD23 AI�˹����܌������
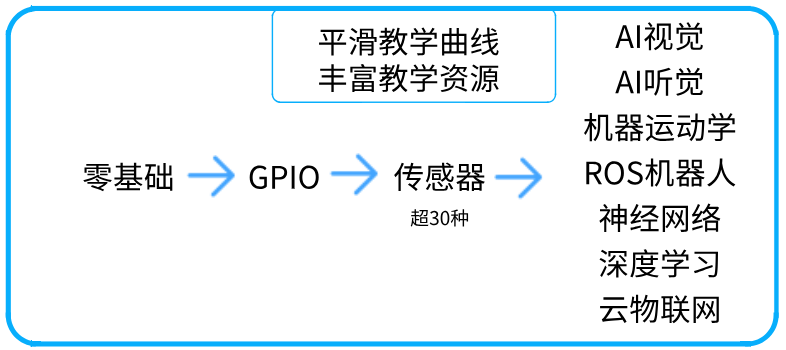
�҂����ڶ�S�ȌW�����`ƽ�_���������W�߽Ƕȣ��Ļ��A�Ϊ��� GPIO �Uչ�_ʼ�W���^�ɵ�����������Ŀ���M��OpenCV��PyTorch��ROS�C����ϵ�y���C���\�ӌW��AIҕ�X��AI �X�ȌW�����Ķ��W�� AI �˹������_�l��
GPU ��128�� NVIDIA Maxwell GPU
CPU ��4��cortex-A57̎����
�ȴ棺4 GB LPDDR 25.6 GB/s
������472 GFLOP
����NVIDIA�����AlӋ��������ϵ�y�Ⱥ���һ��С�Ʌs�������Ӌ��C���������㲢���\�ж����W�j������z�y���ָ���Z��̎���ȑ��ó��� ϵ�y���d�ĺ�cortex- A57̎������128��Maxwell GPU�� 4GB LPDDR�ȴ棬��������AlӋ���������ṩ472GFLOP��������֧��һϵ�����е�Al��ܺ��㷨������TensorFlow��Pytorch�� caffe/caffe2��Keras��MXNET��
��.ϵ�y����cAI���
ϵ�y�A�bubuntu18.04����ϵ�y�����Эh�����a���ļ����Ѱ��b���_�C���á�
Ubuntu 18.04 LTS����Ӌ���I��Ч�ʘO�ߣ��e�m���ڙC���W���@�ӵĴ惦�ܼ��ͺ�Ӌ���ܼ����΄ա�Ubuntun �L��֧�ְ汾���ԫ@�� Canonical �ٷ��L�_����ļ��g֧�֡�Ubuntu 18.04 LTS ߀�������� Linux Kernel 4.15�����а���ᘌ� Spectre �� Meltdown �e�`���ޏͳ���
�ṩԔ����python�_Դ��������
����TIOBE�������� ��Python�ѳ�ԽC#���cJava,C,C++һ��ɞ�ȫ��ǰ4���������Z�ԡ�����Ŀǰ�ٶ�ָ���������ѽ���ԽJava���cC++�������ɞ�������ܚgӭ���_�l�Z�ԡ�
Python���V�������ں���_�l���Α��_�l���Wվ�_�l���ƌW�\�㡢����������Ӌ�㣬�D���_�l���I��Python��ܛ���|�����ơ������_�lЧ�ʡ�����ֲ�ԡ��M�����ɡ��S����֧�ֵȸ��������̎�����M��λ��python���� ���Ρ��W�����M���_Դ������ֲ���ɔUչ����Ƕ�롢������ȃ��c������������������java��C#.net���صף�
JupyterLab����
JupyterLab��һ������Web�Ľ���ʽ�_�l�h��������Jupyter�Pӛ�������a�Pӛ�������a�͔���.JupyterLab�dz��`�����ú������Ñ����棬��֧�֔����ƌW���ƌWӋ��͙C���W���ЏV���Ĺ�����.JupyterLab�ǿɔUչ�ĺ�ģ�K���ľ�������������½M�����c�F�нM������
��NAI���
OpenCVӋ��Cҕ�X�죬TensorFlow AI��ܣ�Pytorch AI��ܵ�
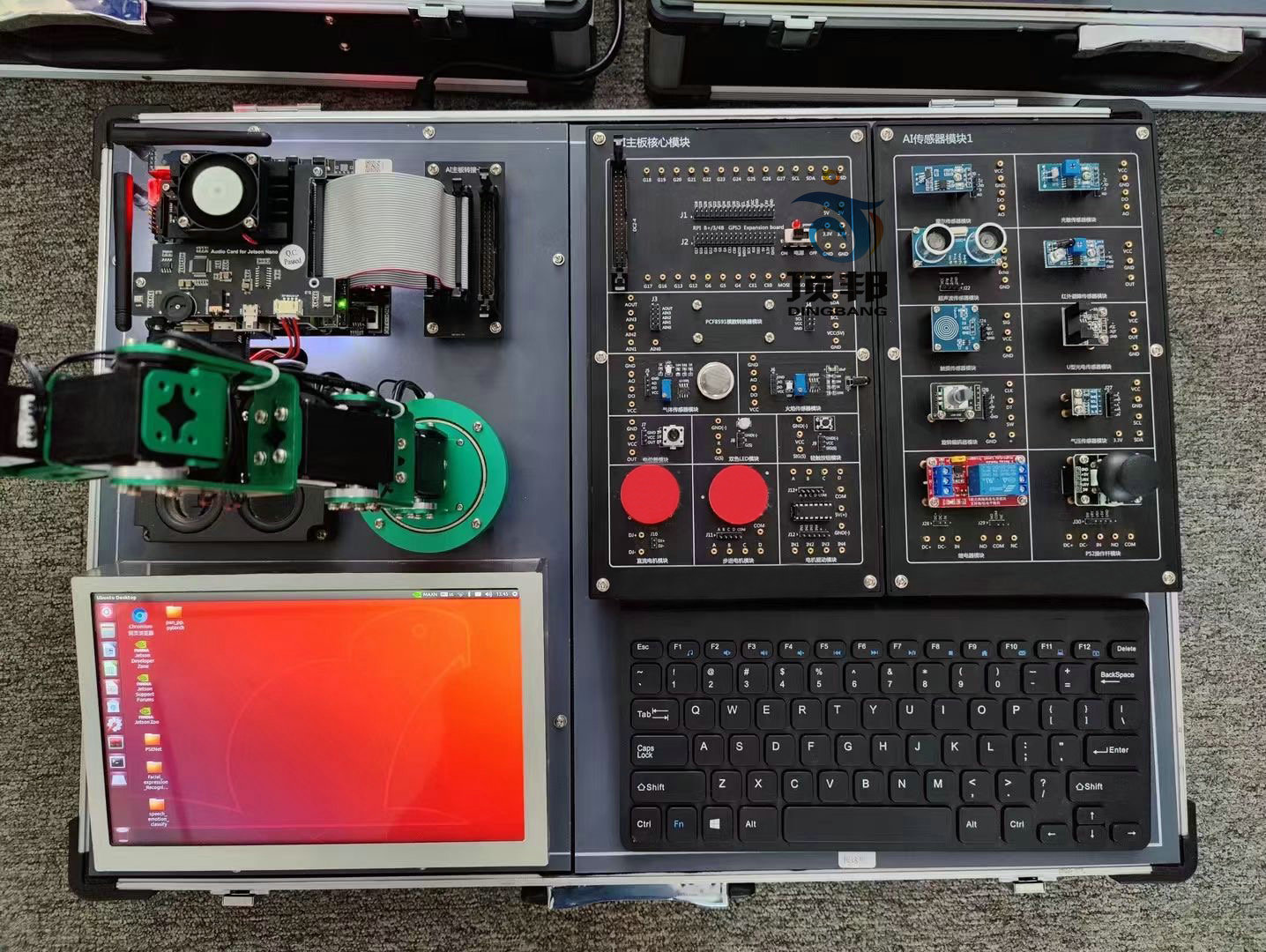
��. ���AGPIO�c���������ģ�K
�pɫLED���
RGB-LED���
�^������
������������
�p�|�_�P���I���
�A��������
��ӂ��������
���Q�����
�ɻɹ܂��������
U��늂��������
PCF8591ģ���D�Q���
���̽�y���������
PS2�ٿv�U���
�����
ģ�M�������������
ģ�M�ضȂ��������
����������
������������
������
���F���������
�|���_�P���
�������������x�z�y���
���D���a�����
�t����������
I2C LCD1602Һ���@ʾ���
BMP180�≺���������
MPU6050���݃x���ٶȂ�����
DS1302���r�r�ģ�M���
ѭ�E���������
ֱ��늙C�L��ģ�K���
���M늙C��ģ�K���
PIR���w���늸Б�ģ�K���
��.AIҕ�X
���wۙ
��Ę�R�eۙ
���S�a�R�e
��܇/���˙z�y
���wۙ
����Dlib���F�������R�e
܇���R�e
�Զ��x���w�R�e
����Pytorch���ք��R�e
AI�˹�����Ę�������R�e
�ɫ�R�eۙ
�ɫץȡ
�ɫ����
ģ��Ӗ��-�Cе�������֒�
���w�����R�e����-�Cе���քݻ��ӣ��R�e��N�քݲ����������Ą�����
���w�����R�e����-�Cе���ք�ץȡ���R�e�����քݣ��ѯB�Ӕ�������ȭ�^�ք����Ƶ���
���w�����R�e����-�Cе����Ę�R�eۙ���z�y��Ę���R�e���ۙ�Ƅӣ�
��.AI �X
�ھ��Z���ϳɌ����ı��D����MP3��ʽ�����l�����ţ�
�Z�� ����ʽ�������Z���D���������ı�ݔ����
�D�`�C���ˌ�ݔ�댦Ԓ���ݺC���ˌ��؏͌�Ԓ�ă��ݣ�
AIUI���(�ƴ�Ӎ�w�Ƴ�����Ȼ�Z���������ĵ�ȫ�·�˙C�����Z����Q����)
VAD���(�Z����әz�y(Voice Activity Detection,VAD)�ַQ�Z�����c�z�y,�Z��߅��z�y)
Сޱ�C�����Z��Ԓ���\�г����M�댦Ԓ��B��
Snowboy�Z���ь�KITT.AI�_�l���˹�����ܛ�����߰���ͨ�^Snowboyܛ�����_�l�ˆT������һЩӲ���O�������� “�Z�����~̽�y” �����Ñ�ͨ�^�c�Ƅ��O���M�Ќ�Ԓ��“����” �� “����” ����ȥ��һЩ���顣���@���^���У��O���ͨ�^���˵� “�Z������” ׃���һ�����ܻ��C���ˡ���
6.�C���\�ӌW�cROS�C����
�֙CAPP���ƙCе�ۣ�IO/����
FPV��һҕ�ǿ���
6���ɶșCе��
���ܴ��п�����C
PC��λ�C����
��λ�C����FPV�z���^������߀�����˙Cе��3D����ģ��
3Dģ�ͺ͌��wͬ���D�ӣ��Cе�ۿ�����Փ�͌��H��Y��
�Cе���Զ��x�W�������M
�M��W��ģʽ���ͨ�^�xȡ��ӛ�ÿ���D�ӵĽǶȣ����F�W�����؏͈��Є����M
Ȥζ�̶������M
APP���ṩ8�N�̶������M�����c����̖�M���A�[���c���\�к��_ʼ���С�
�Cе��ͬ��ʾ�̣���2�_��
�xȡ���C�˵��P���Ƕȣ����r��ݔ���ęC�ˣ��ęC�������C�ˑBͬ���D��
6���ɶ����\�ӌW����
�ֽ�Cе��6�����ɶȵĶ�C�\�ӿ��ƣ�ͨ�^ݔ��Ŀ������Ӌ�����C����Փ�\�ӽǶȣ��Y�϶�C���ƅf�hͬ�r���Ƹ�����C�\��
ROS����ϵ�y
ROS�C���˲���ϵ�y�ǹ��ߡ���ͅf�h�ļ��ϣ�ּ�ں����C����ƽ�_���������s������ęC����
7.�����W
����MQTT�f�h�����W���
���ڰ����Ƶ����W���
���ڰͷ��Ƶ����W���
��С����ĽY��
������С��������W�֙C�ˌ��
���W���ܟ��
���W�����L�Ȍ��