
 |
|










| ���܆�Ԫ | ���� | �������� |
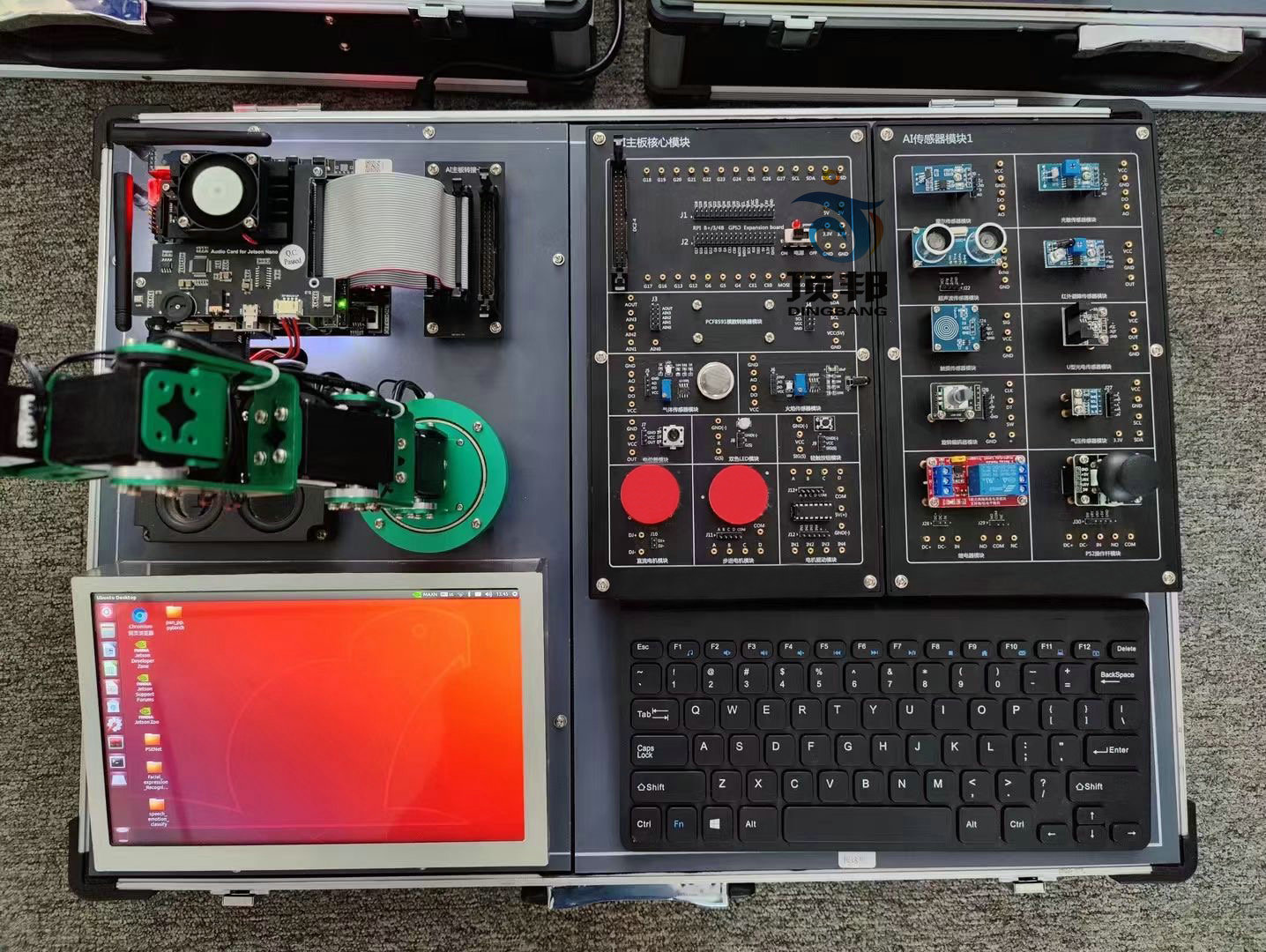
| ����� | ���γߴ磺≥610*440*240mm�� | ��������Xľ�Ͻ���ϣ����ܰ��b�������o�|��������w�Ȳ������惦���g���������ƴ��ģ�K����������_��ʽ�鰴�������� |
| AI�\���Ԫ |
GPU ��128�� NVIDIA Maxwell GPU�� CPU ��4��cortex-A57̎������ �ȴ棺4 GB LPDDR 25.6 GB/s�� ������472 GFLOP�� ���ĔUչ����������4��USB3.0�ӿڣ�֧��HDMI��DPҕ�l�ӿڣ�һ·M.2�ӿڵĆ�·PCIE�������b��ɢ���L�ȣ� 40pin GPIO�� �W�j��ǧ����̫�W�ڡ��o���W��֧��2.4Ghz/5GHZ,֧���{��4.2�� |
���bUbuntu 18.04 LTS+ROS Melodic����ϵ�y������JupyterLab�_�l�h����Anaconda 4.5.4̓�M�h����֧��һϵ�����е�AI��ܺ��㷨������TensorFlow��caffe/caffe2��Keras��Pytorch��MXNET �ȣ�ϵ�y���b��OpenCVӋ��Cҕ�X�죬TensorFlow AI��ܣ�Pytorch AI��ܡ� |
| �C� |
�Cе�����ɶȣ�5���ɶ�+�A������200g��Чؓ�d����չ350mm�� ��C������15Kg*5+6Kg*1���ܴ��п�����C�� ���|��ꖘO����̎���X�Ͻ� |
���ڙC�����\�ӌW�c�C����ϵ�y��������ɊA�ַeľ�Ȅ����� |
| Ƕ��ʽ�������� |
�ӿڣ�6��������C�ӿڣ� PWM��C�ӿڣ�i2C�ӿڣ���AI���İ���߀֧��STM32��Raspberry Pi�� OLED:�@ʾCPUռ�ã��@ʾ�ȴ�ռ�ã��@ʾIP��ַ�Ȼ��A��Ϣ�� ���I��K1+K2�I+RESET�I�� 1 ��RGB���� |
����֧�֙Cе�ۄ����� |
| �z���^ | ����USB�ӿڣ�30�f���أ�110�ȏV�ǔz���^��480P�ֱ��ʣ�600*480�� | AIҕ�X���������֒��Ȍ� |
| AI �X��Ԫ |
���lоƬ������SSS1629���lоƬ�� �����L�����d�ɂ����|��MEMS�������L�� �ӿڣ��˜�3.5mm���C�ӿڡ��pͨ�����Ƚӿڣ� |
����USB�ӿ��OӋ�����ӣ���ϵ�y���ݣ�����������������|���ӡ��������AI �X� |
| ���������ģ�K |
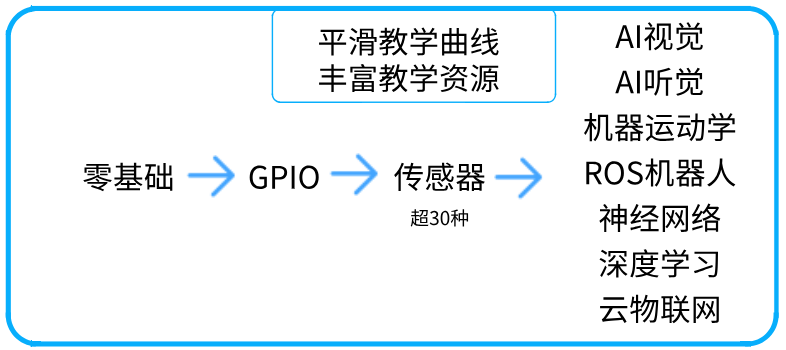
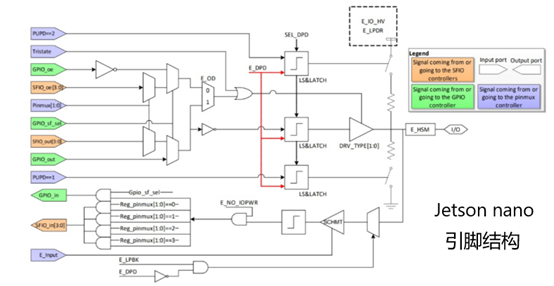
���������ģ�K��Jetson nano��GPIO�ӿ��������������GPIO�����Ұ���������n�̣��pɫLED�� �^����� �p�|�_�P���I��U ��늂�������ģ���D�Q��PS2 �ٿv�U���λ����ģ�M�������������������������������w���������|���_�P���������������x�z�y�����D���a�����t����ς��������≺�����������݃x���ٶȂ�������ѭ�E��������ֱ��늙C�L��ģ�K�����M늙C��ģ�K�� |
���������ģ�K���Ը��õĎ����W���߸��ӿ��ٵ����TJetson nano��GPIO���ƣ��Ļ��A���֣���Ɍ���Ŀ��ͬ�r������GPIO�Ϳ��Ƅӵ�ģ�KҲʹ�҂����m��ʹ�ú��_�l���ӷ��㡣 |
| �@ʾ�� | 10���@ʾ����HDMI�ӿڣ�1080P�ֱ��ʡ� | �@ʾ���Aб���b���Aб�Ƕȴ���5°�����ڲ���ϵ�y�@ʾ�� |
| �I�P��� | ��늳ع�늣��o���{���B�ӡ� | ����ϵ�y���ơ� |
| �̌W�n�� | �n�̃��� |
| ���Փ | ��������������ꇡ����� |
| ��ꇺ�������� | |
| ��λ��ꇺ����� | |
| �������P�������ӿ��g | |
| ���� | |
| ������͵ľ�ꇺ����� | |
| �E�\�� | |
| Moore-Penrose���� | |
| �����c��ϢՓ | �S�C׃���c���ʷֲ� |
| �xɢ��׃���c���ʷֲ��� | |
| ��Ҋ���xɢ���ʷֲ� | |
| �B�m��׃�������ܶȺ��� | |
| ��Ҋ���B�m�Ը��ʷֲ� | |
| �ϸ��� | |
| ߅������ | |
| �l������ | |
| �����Ժ͗l�������� | |
| ����������ͅf���� | |
| ��ϢՓ |
| �̌W�n�� | �n�̃��� |
| ׃���c����������� | ׃�� |
| ����������� | |
| �б���Ԫ�M | �б� |
| Ԫ�M | |
| �ֵ��c���� | �ֵ� |
| ���� | |
| ͌��� | ��������� |
| Ķ��x��ʹ�� | |
| ���� | |
| �^�� | |
| ģ�K�������OӋ | �����������{�� |
| �������f | |
| ��ȌW����ܺ��� | TensorFlow |
| PyTorch | |
| Caffe/caffe2 | |
| PaddlePaddle | |
| Linux�_�l�h������ | Ubuntu����ϵ�y |
| ���������� |
| �̌W�n�� | �n�̃��� |
| �������� | Ӗ�������yԇ������C�� |
| �^�M�ϡ�Ƿ�M�ϡ����� | |
| �W���ʡ����t����������C | |
| K-�����㷨 | �������� |
| K���xȡ | |
| ���x�Ķ��� | |
| ֧�������C | �g���c֧������ |
| ��ż���} | |
| �˺��� | |
| ܛ�g���c���t�� | |
| K-��ֵ��� | K-��ֵ��� |
| �Q�ߘ���S�Cɭ�� | �Q�ߘ�Ļ������� |
| �x����ф��֘˜� | |
| �S�Cɭ�� | |
| �W�j | ��Ԫģ�� |
| ��֪�� | |
| ���Ӹ�֪�� | |
| ����L�U�ͽY���L�U | |
| �ݶ��½��ͷ������ | |
| RBF�W�j | |
| ���ތW���C | |
| �W�jӖ������ |
| �̌W�n�� | �n�̃��� |
| �˹����� | �˹����ܡ��C���W���c��ȌW�� |
| ��ȌW�� | ��ȌW���İlչ�v�� |
| ���e�W�j | �lչ�v�� |
| �����Y�� | |
| ǰ���\���c������� | |
| ���P���| | |
| ���e�W�j׃�N | |
| ���þ��e�W�jģ�� | |
| ѭ�h�W�j | ѭ�h�W�j���� |
| �L�̕rӛ���W�j�� | |
| ѭ�h�W�j��׃�w | |
| ���Ɍ����W�j | ���Ɍ����W�j���� |
| ���Ɍ����W�j�����Y�� | |
| ���Ɍ����W�j׃�N |
| ����n�� | �n�̃��� |
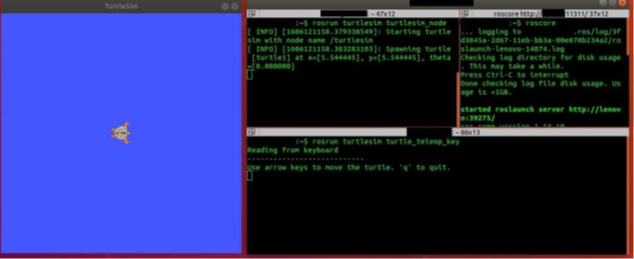
| ROS���A�c�\�ӌW | ROS���A�n�� |
| ROS���������Ŀ | |
| �Զ��x��Ϣ | |
| ServerͨӍ | |
| �Cе��URDFģ�� | |
| �Cе���\�ӌW������ | |
| MoveIt���� | |
| ���ܴ��п�����C | |
| PC��λ�C���� | |
| �Cе���Զ��x�W�������M | |
| �Cе���P�����ȼ�ĩ���ˑB���� | |
| �Cе�۹����^���ץȡ�����\ | |
| 6���ɶ����\�ӌW���� |
| ����n�� | �n�̃��� |
| Jetson nano GPIO�n�� | �pɫLED���� |
| ���z�y | |
| �^������� | |
| �p�|�_�P���I | |
| PCF8591ģ���D�Q | |
| PS2�ٿv�U | |
| �|���_�P���� | |
| ֱ��늙C�L�� | |
| ���M늙C�� | |
| ����������n�� | ģ�M���������� |
| ģ�M�ضȂ����� | |
| ����� | |
| ���F������ | |
| �������������x�z�y | |
| ���D���a�� | |
| �t������� | |
| BMP180�≺������ | |
| MPU6050���݃x���ٶȂ����� | |
| ѭ�E������ |
| ����n�� | �n�̃��� |
| �Cе�ۻ��A�n�� | �Ñ����I���� |
| ���Q�����ƌ�� | |
| OLED���ƌ�� | |
| ���Ɔ���C | |
| ͬ�r����6����C���� | |
| �xȡ��C��ǰλ�� | |
| �Cе���P���˶����` | |
| �Cе���P�����ȼ�ĩ���ˑB���� | |
| �Cе���赸���� | |
| �Cе�۰��\ɫ�K���` | |
| �Cе�۰��\�a��ɫ�K���` | |
| �Cе��ץȡ�����^����c�˶� | |
| �Cе��ץȡ�����^����K�yԇ |
| ����n�� | �n�̃��� |
| AIҕ�X�_�l�n�� | ���b��ʹ��Matplotlib��Pyplot �� Numpy |
| ��OpenCV���\�Дz���^ | |
| JetCam���МyԇUSB�z���^ | |
| OpenCV�xȡ��������@ʾ�D�� | |
| OpenCV�xȡ���@ʾ�ͱ���ҕ�l | |
| OpenCV�L�D����ʹ�� | |
| OpenCV�D���|�������ز��� | |
| OpenCV�DƬ���� | |
| OpenCV�DƬƽ�� | |
| OpenCV�DƬ�R�� | |
| OpenCV����׃�Q | |
| OpenCV�DƬ�s�� | |
| OpenCV�DƬ���D | |
| OpenCV�DƬ̎�� | |
| OpenCV�Ҷ�̎�� | |
| OpenCV�D������ | |
| OpenCV߅���z�y | |
| OpenCV��ֵ��̎�� | |
| OpenCV���ΈA���L�� | |
| OpenCV���ֈDƬ̎�� | |
| OpenCV�����L�� | |
| OpenCV��ɫ�DƬֱ���D | |
| OpenCVֱ���D���⮋ | |
| OpenCV�DƬ���a | |
| OpenCV�������� | |
| OpenCV��˹��ֵ�V�� | |
| OpenCVĥƤ���� | |
| OpenCV��ֵ�V�� | |
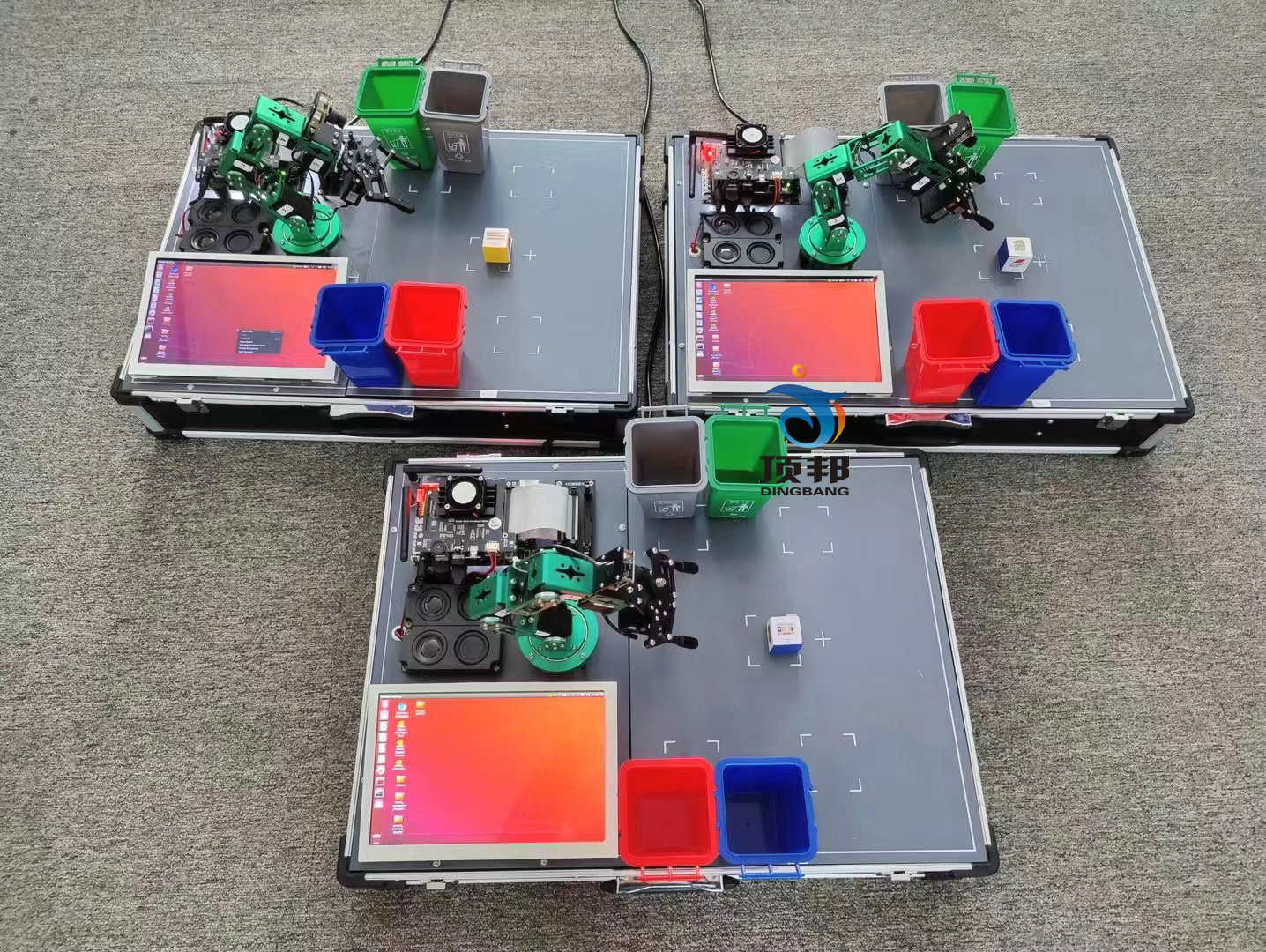
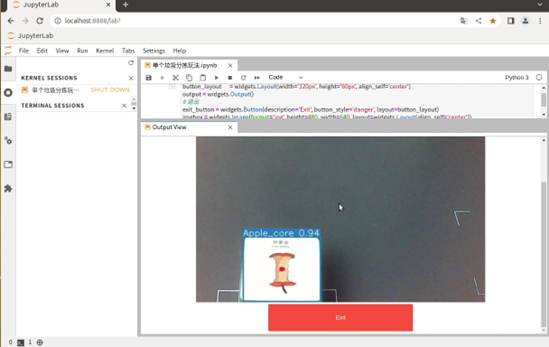
| AIҕ�X�c�Cе�۾C���n�� | �ɫ�z�y |
| Ę�����۾��z�y | |
| ���˙z�y | |
| ��܇�z�y | |
| ܇�ƙz�y | |
| Ŀ��ۙ | |
| ����w���r� | |
| �z���^�Cе�����wۙ | |
| �z���^�Cе����Ęۙ | |
| ɫ�Kץȡ�֒���� | |
| �z���^ArucoTag�R�eץȡ��� | |
| AI�˹����ܙCе���c���˻��ӌ��` | |
| AI�˹����ܙCе���ք��R�eץȡָ��ɫ�K�M�дa�� | |
| AI�˹����ܙCе����������` | |
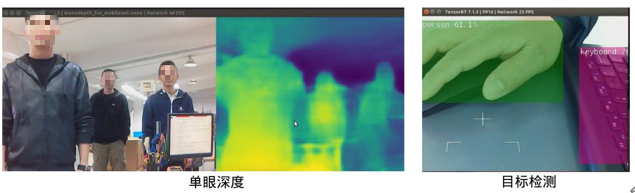
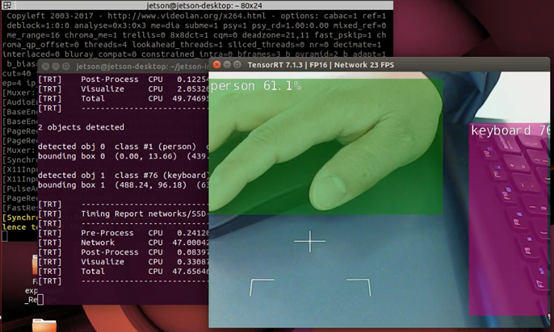
| Ƕ��ʽҕ�X���� | �D���� |
| ���w�z�y | |
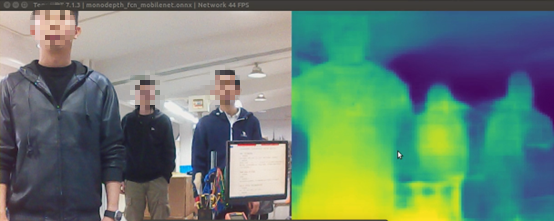
| �Z�x�ָ� | |
| Ŀ�˙z�y | |
| ���w�ˑB�����R�e | |
| �����Ƴ� | |
| ������ȈD |
| ����n�� | �n�̃��� |
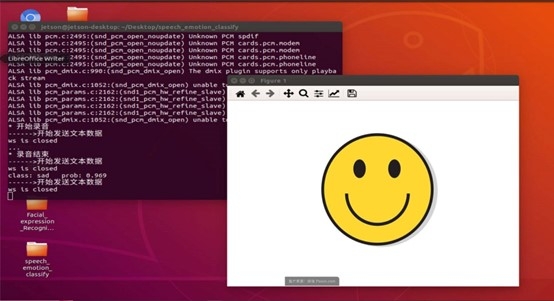
| AI �X�I��ǰ���㷨 | �B�ӕr����ģ�� |
| Attentionģ�� | |
| ����HMM���Z���R�e | |
| Transformer | |
| AI �X�C�ό��� | AI �X�I��ǰ���㷨 |
| �ھ��Z���ϳ� | |
| �Z�� ����ʽ | |
| �D�`�C���� | |
| AIUI | |
| VAD���c�z�y | |
| Сޱ�C�����Z��Ԓ | |
| Snowboy�Z���� | |
| �Z������R�e | |
| ���� Kaldi ���Z���R�e���` |
������ʾ��
1��؛Ʒ��գ��w����؛�rՈ�z��AI�˹����܌�����؛Ʒ���^���ˌ�AI�˹����܌����Ĕ��������������̎���ܓp��B��AI�˹����܌���䣻
2���|����픰���w���ṩAI�˹����܌����aƷ�f�����ȵ��|���l�����|���ڣ����|���������ṩ��AI�˹����܌��������M�S�ޣ������l�����Z�r�ṩ��AI�˹����܌������Ѓ��S�ޣ�
3���˓Q؛���w�η���ԭ���µ�AI�˹����܌�����x���e�`��AI�˹����܌����ُ�I�����e�`�����AI�˹����܌������˓Q؛Ҫ���������ܣ�
4��؛�ڣ�AI�˹����܌����İl؛�ڞ酢��ֵ��������Ҫ�˽�AI�˹����܌����ľ��_؛�ڣ�Ո�c픰���N���ˆTϵ��
5�����w��AI�˹����܌�������κ��Ɇ���Ո��늣�021-36334717 ���҂����Ɍ��I��ʿ�����ṩ���PAI�˹����܌�������ԃ��
�Ҳ������ҵĮaƷ?Ո�c���aƷ����� |