
 |
|

�a(ch��n)Ʒ����(sh��)
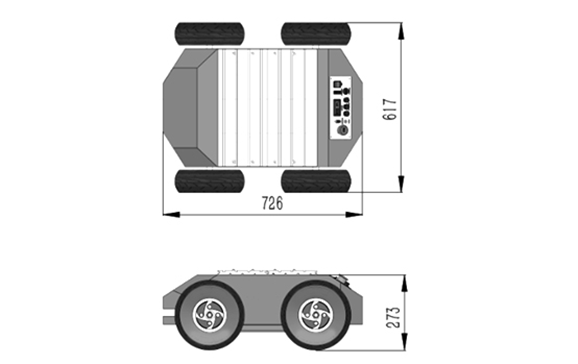
1.�o(w��)��܇(ch��)����(sh��)
|
��̖(h��o) |
���Q(ch��ng) |
����(sh��) |
��̖(h��o) |
���Q(ch��ng) |
����(sh��) |
|
1 |
�ߴ磨�L(zh��ng)*��*�ߣ� |
726*617*273mm |
13 |
�(q��)��(d��ng)��ʽ |
4�(q��) |
|
2 |
݆�� |
535mm |
14 |
�D(zhu��n)��ʽ |
�����D(zhu��n)�� |
|
3 |
�S�� |
386mm |
15 |
���ư� |
Stm32 |
|
4 |
���� |
40kg |
16 |
ͨ�Ž�⼝ |
USB���� |
|
5 |
ؓ(f��)�d |
ֱ��50kg |
17 |
���a������ |
400�� |
|
6 |
늙C(j��)��(sh��)�� |
2 |
18 |
PID�����l�� |
50Hz |
|
7 |
늙C(j��)���� |
24V250W |
19 |
�m�õ��� |
ȫ���� |
|
8 |
݆̥ |
10����݆̥ |
20 |
��ֱԽ������ |
8cm |
|
9 |
늳� |
24V DC�����F�늳� |
21 |
�������� |
25° |
|
10 |
�m(x��)���r(sh��)�g |
4�r(sh��) |
22 |
�ֱ����� |
���20m |
|
11 |
�o���Դ |
3*12V DC�� 1*5V usb�� |
23 |
�ֱ�ͨ�� |
2.4Ghz |
|
12 |
��⼤�ٶ� |
0.8m/s |
|
|
|
2.�������(sh��)
|
��̖(h��o) |
���������Q(ch��ng) |
|
��(sh��)�� |
|
1 |
MiniӋ(j��)��C(j��) |
CPU AMD® Ryzen3 3200G
оƬ�M AMD® A300
��(n��i)�� DDR4 8GB
Ӳ�P(p��n) NVMe 250GB
ϵ�y(t��ng) OSϵ�y(t��ng) �I�P(p��n)/�ֱ����ƙC(j��)�����\(y��n)��(d��ng) joystick_drivers�̾��x����
Cartographer 2D SLAM���D/��λteb_local_planer ���c(di��n)��(d��o)�� ���ڏ��Ԏ���Փ�C(j��)���˾ֲ�·��Ҏ(gu��)�� ѭ�h(hu��n)ѭ�Eȫ��Ҏ(gu��)���� Simulation ����ģ�M�� |
1 |
|
2 |
�Դ�M�� |
늳� ��24V DC�����F�늳�
늳����� 16AH @ 24V
ݔ��/ݔ�� 24V x 10A / 12V x 20A
ݔ���ڔ�(sh��)�� 5��(g��)XT30����(li��n)��
�y��늉� < 100mV |
1 |
|
3 |
�@ʾ�� |
�ߴ� 13.3 Ӣ��1080P HDR
ǰ��ξ��������_(d��)
�y(c��)�����x 0.15-10 m @ 10%
�Ƕȷֱ��� 0.36 °
�����ٶ� 15 Hz
�؏�(f��)���� ±3 cm
���x�ֱ��� 1 cm |
1 |
|
4 |
������C(j��) |
�ߴ� 103mmx33mmx22mm
������ ToF CCD+RGB
����l(f��)���� 940nm VCSEL
ToF�ֱ��ʎ��� 640X480, Max.30fps
RGB�ֱ��ʎ��� 1920X1080, 30fps
ToF FOV 69°(H) × 51°(V)
RGB FOV 73°(H) × 42°(V)
ݔ����ʽ RAW12(���,IR), MJPEG(RGB)
�z�y(c��)���x 0.35m~4.4m
�����ض� -10��~50�� |
1 |
|
5 |
�ྀ�������_(d��)��RS-lidar-16�� |
����16��
���L(zh��ng)905nm
����ȼ�(j��)class1
����±2cm(����ֵ)
�y(c��)��20cm-150m(Ŀ��(bi��o)������20%)
���c(di��n)��(sh��)320,000pts/s
��ֱҕ��(ch��ng)��+15°~-15°
��ֱ�Ƿֱ���2.0°
ˮƽҕ��(ch��ng)��360°
ˮƽ�Ƿֱ���0.09°��0.36°(5-20Hz)
�D(zhu��n)��300-1200rmp(5-20Hz)
�ɼ���(sh��)��(j��)���S���g����(bi��o)�������� |
1 |
|
6 |
�T��(d��o)��AH200C�� |
��λ���y(c��)��������±180°�������c�ŷ�λ���x��
�y(c��)������(RMS)@25�棺<1.5°(�o(w��)�Ÿɔ_�l����)
�ֱ��ʣ�<0.1°
�A���y(c��)��������±500°/sec
�y(c��)������(RMS)@25�棺<±0.5 °(��(d��ng)�B(t��i))��<±0.2 °(�o�B(t��i))
�ֱ��ʣ�<0.1°
���݃x�y(c��)��������±180°�������c�ŷ�λ���x��
���c(di��n)ƫ�(w��n)����@25�棺<200 °/hr
�ֱ��ʣ�<0.1°/sec
������>100Hz
���ٶ�Ӌ(j��)�y(c��)��������±8G
�ֱ��ʣ�<10mg
������>100Hz
�ň�(ch��ng)Ӌ(j��)�y(c��)��������±8gauss
�ֱ��ʣ�<2.5mgauss
������14-17Hz |
1 |
������ʾ��
1��؛Ʒ�(y��n)�գ��w����؛�r(sh��)Ո(q��ng)�z�����ܟo(w��)��܇(ch��)��؛Ʒ���^���ˌ�(sh��)���ܟo(w��)��܇(ch��)�Ĕ�(sh��)�������������̎���ܓp��B(t��i)�����ܟo(w��)��܇(ch��)��
2���|(zh��)����픰���w���ṩ���ܟo(w��)��܇(ch��)�a(ch��n)Ʒ�f(shu��)����(sh��)��(n��i)���|(zh��)���l�����|(zh��)���ڣ����|(zh��)��������(n��i)�ṩ��(du��)���ܟo(w��)��܇(ch��)�����M(f��i)�S�ޣ������l�����Z�r(sh��)�ṩ��(du��)���ܟo(w��)��܇(ch��)���Ѓ��S�ޣ�
3���˓Q؛���w�η���ԭ��?q��)��µ����ܟo(w��)��܇(ch��)�x���e(cu��)�`�����ܟo(w��)��܇(ch��)ُ(g��u)�I(m��i)��(sh��)���e(cu��)�`��������ܟo(w��)��܇(ch��)���˓Q؛Ҫ���������ܣ�
4��؛�ڣ����ܟo(w��)��܇(ch��)�İl(f��)؛�ڞ酢��ֵ��������Ҫ�˽����ܟo(w��)��܇(ch��)�ľ��_؛�ڣ�Ո(q��ng)�c픰���N(xi��o)���ˆT(li��n)ϵ��
5�����w��(du��)���ܟo(w��)��܇(ch��)���κ��Ɇ�(w��n)��Ո(q��ng)��늣�021-36334717 ���҂����Ɍ�(zhu��n)�I(y��)��ʿ�����ṩ���P(gu��n)���ܟo(w��)��܇(ch��)����ԃ(x��n)��
�Ҳ������ҵĮa(ch��n)Ʒ?Ո(q��ng)�c(di��n)���a(ch��n)Ʒ��(d��o)���(y��) |