
ˮ��Һλ�c늄��y֧·�����������ƌ��
һ�����Ŀ��1����ϤҺλ-������������ϵ�y�ĽY���c�M�ɡ�
2������Һλ-������������ϵ�y��Ͷ�\�c��������������
3���о��A�S�_�ӷքe�����ڸ������������r��ϵ�y��׃����Ӱ푡�
4�������������������ĸ�׃��ϵ�y���ܵ�Ӱ푡�
��������O��
1���^�̿��ƾC�ό���b��—DDC����ģ�K
2��Ӌ��C��MCGS�M�Bܛ��—DDC���ƌ��_ModBusRTU.MCG
3�����þ����ɼ�RS485�D232ͨӍ��һ����
�������ԭ��
��������Ӌ��C����,����ˮ��Һλ�������O���߶ȡ�������·���Ƀȷ����M�ɵ��p�h����ϵ�y�����ڏ��s���Ʒ�������Ӌ��C���O���˃ɂ�̓�M��������������������������ˮ���Һλ��̖ݔ��������������ݔ�룬����������ݔ�����鸱��������ݔ�룬�ڴ�������ϵ�y�У��ɂ��������΄ղ�ͬ�����Ҫ�x��������IJ�ͬ�{��Ҏ���M�п��ƣ�����������Ҫ�΄��ǿ��ل�����Ѹ�ٵ����M�븱��·�Ĕ_�ӣ����ڸ���·���{����Ҫ��һ���ǟo�o������������΄��ǜʴ_������ˮ��Һλ���O��ֵ����ˣ�������������PI������Ҳ�ɿ��]����PID�������� Һλ-������������ϵ�y�ķ��Kԭ��D��D4.7��ʾ��
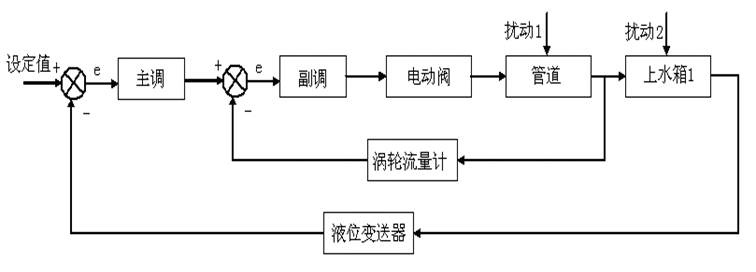
�D4.7 Һλ-������������ϵ�yԭ��D
�ġ����E�c����
1���˽⌍��b���еČ������̈D��D4.8��ʾ��

�D4.8 Һλ-������������ϵ�y���̈D
2�� ������Ҫ��ӺÌ�����ͨӍ����
ʹ��485�D232ͨӍ���������_��߅DDCͨӍ�� “COM1” �c��λ�C�B�ӡ�
�ڂ�������̖ݔ���^������Ӌ1��̖ FT1��̖�Ì��B�ӵ�DDC����ģ�K��AI0��̖ݔ��ˣ�����ˮ��Һλ��̖LT1�Ì��B�ӵ�DDC����ģ�K��AI1��̖ݔ��ˣ���ؓһһ������
��DDC����ģ�Kݔ����̖AO0�B�ӵ�������������̖ݔ��^��늄��{���y������̖�˿ڣ���ؓһһ������
3�����ք��y�T1V1ȫ�_��V3��V4���_�����ք��y�T1V2�P�]��
4���ȴ��_�����_��ȵĿ��Դ�_�P����“Start”���o�����O�䣬�ٴ��_DDC�Դ�_�P��
5���\��Ӌ��C�ϵ� DDC���ƌ��_ModBusRTU.MCG���̣��x��“ϵ�y����”�����ˆ��е�“�Ñ����”�����F���½��档
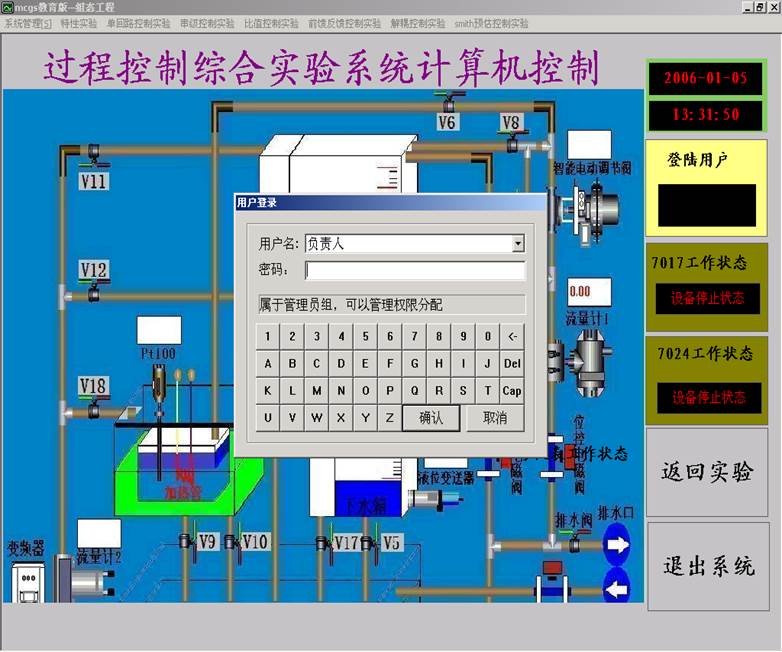
�D4.10 �Ñ���䛽���
6���c��“�_�J”���Ñ�����ꮅ���x��“�������ƌ��”�����ˆ��е�“��ˮ��Һλ�c늄��y֧·�����������ƌ��”�����F���µ�“��ˮ��Һλ�c늄��y֧·�����������ƌ��”���档
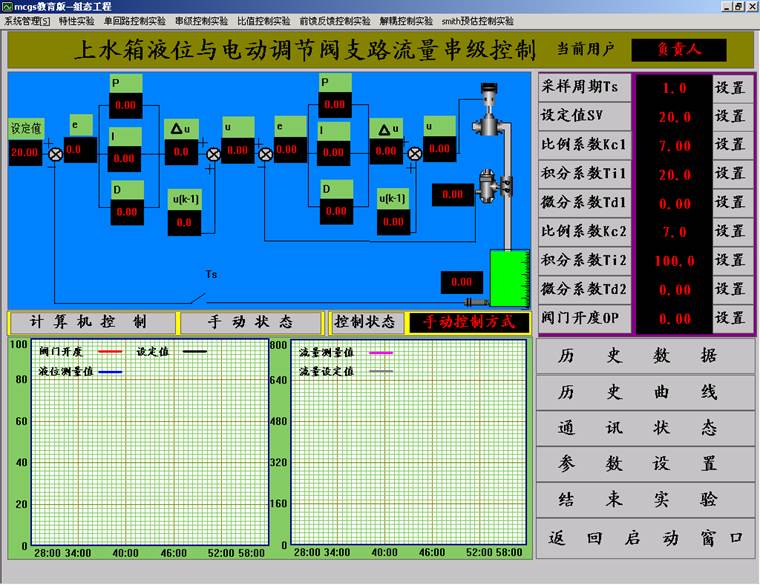
�D4.11��ˮ��Һλ�c늄��y֧·�����������ƌ�����
7���c��“�����O��”�����F���½��档
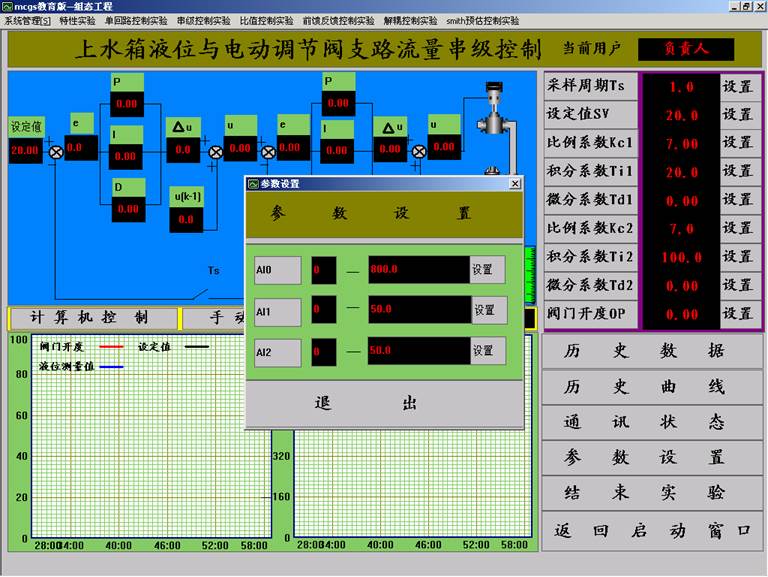
�D4.12 �����O�ý���
8����AI0�O�Þ�0 – 1200��AI1�O�Þ�0-30�c���˳��������O���ꮅ��
9���{���������O�á�
Ts=1 ������ֵ�� SV=8 ������ֵ��
Kc1=0.02 ������ֵ�� Ti1=5������ֵ�� Td1=0 ������ֵ��
Kc2=8 ������ֵ�� Ti2=65 ������ֵ�� Td2=0 ������ֵ��
10���x��Ӌ��C���Ʒ�ʽ, �ڿ����_�ϴ��_ˮ�á�늄��{���y�Դ��
11���^��Ӌ��C�ϵČ��r�����͚vʷ������
12����ϵ�y�����o���ӂ��A�S��̖���^����Һλ׃��������
13���ٵ�ϵ�y�����oϵ�y�ӂ��ɔ_��̖���^��Һλ׃��������
14�����Y�����P�]ˮ��1��늄��{���y�����ԇ��
�塢�����Ҫ��
1��������Ҏ����棬����Һλ-������������ϵ�y�ĽY����D��
2���Ì������������������P���������������^�̡�
3�������_�ӷքe����������������rϵ�yݔ����푑�����������ϵ�y���A�S�_�������µ��o���ӑB���ܡ�
4���������������������ò�ͬPID�����r�������ϵ�y���ܵ�Ӱ푡�
����˼���}
1����ʲô����·�Ŀ�������P���ƣ���������PI����Ҏ�ɣ�