
���I(y��)�C�����������M����I(y��)�в����������Ҫ�b����ֶΣ��ѳɞ����һ����������I(y��)ˮƽ�ͿƼ�ˮƽ����Ҫ��־���҇���̎�ڼӿ��D����������Ҫ�r�ڣ��Թ��I(y��)�C���˞����w�ęC���ˮa�I(y��)�������ƽ��҇��a�I(y��)�ɱ��������h(hu��n)���Ƽs���}����Ҫ·���x�a�I(y��)�İl(f��)չ������������|�������͌��T�˲ţ��˲Ŷ�ȱ�ѽ��ɞ�a�I(y��)�l(f��)չ��ƿ�i��Ŀǰ�����I(y��)�C���˼��g���I(y��)�����������ʺ��ѳɞ���c���g���I(y��)���քe�Ǹ���"���I(y��)�C���˼��g"���I(y��)������"�C늼��g���ã����I(y��)�C���˷���
���ڹ��I(y��)�C���˼��g���I(y��)���������B(y��ng)�������˲ţ������w���������棬�t�������B(y��ng)���I(y��)�C�����{ԇ���̎��Ͳ������S�o�ˆT����ҪĿ�ˣ�ʹ�W�����������Ĺ��I(y��)�C������Փ֪�R���A���쾚�ع��I(y��)�C���˲����������S���ع��I(y��)�C���˾����{ԇ����ˣ�����Ӳ�����O��ܛ�����á��̌W�YԴ���O������������c�����Sһ�w��WУ���O���I(y��)�C���ˌ�Ӗ���ġ�
���I(y��)�C���ˌ�Ӗ�����nj��T�Թ��I(y��)�C���˞���ĵļ��g���Ì�Ӗ���ġ�����ƽ�_���Ԍ��H���I(y��)�����Þ���A�������H���I(y��)�F(xi��n)���O���M���្�͝�s���Y�ϙC���Ԅӻ�����M������ИI(y��)���Ԅӻ����õ����c���ڹ⡢�C��늡�����һ�w����ᘌ�������Ӗ����M�Ќ��T�OӋ�c�aƷ���܃�(y��u)����ͨ�^Ӗ��������ʹ���ߌ����I(y��)�C���˼��g�����á�ҕ�X�ęz�y�͑��á��C���˹���վ���OӋ�����b���Ӿ������̡��{ԇ�������\���c�S�ȾC���I(y��)������ʹ�W�����ո���Ĺ��I(y��)�C���˵��͑��õĹ�ˇ֪�R�������{ԇ�����Ռ��H�����ӹ����^���õ��ĵ�����վ���W�����չ����ӹ��^�������漰���Ĺ��I(y��)�C���˹���վ�Ĺ�ˇ���W�����յļ��ܸ���ȫ�棬�W���͘I(y��)�ķ�����ӌ������m�ϙC���Ԅӻ�����P���I(y��)�Ŀ��к͌�Ӗ��ͬ�rҲ�m�Ϲ��̼��g�ˆT�ύ���Ӗ��
���I(y��)�C���ˌ�Ӗ���ĵĽ��O��ȫ�M���_�O���I(y��)�C���˼��g���Ì��I(y��)���m�����B(y��ng)�����|���ͺ����˲����B(y��ng)������ͨ�^�̌W������Ӗ�����Ԟ���I(y��)���B(y��ng)�����Ԅӻ��ߌӴ��˲ţ����⌢���˲�ȱ���Ć��}��ͬ�r�҂���������ҽ��O��һ�����̌W�wϵ�������_�Ź�������ɫ�r�������B(y��ng)�����|�˲ŵ���Ҫƽ�_�������_��ˮƽһ���Ĺ��I(y��)�C���ˌ��̌Wʾ�����ġ�
�����Ŀ���O����
��һ�����I(y��)�C���˹��̑��Ì�Ӗ��

���I(y��)�C���˰��\ϵ�y(t��ng)���ɹ���վ
�aƷ��Ҫ�M�ɼ�����(sh��)
| ��̖ | �� �Q | Ҏ(gu��)���f�� | ��(sh��)�� | ��λ |
| 1 | ��Ӗƽ�_ | �ɻ��AӖ���^(q��)��ģ�M���Å^(q��)�M�ɣ����|���Y���������X�Ͳġ� | 1 | �_ |
| 2 | �����ɶȹ��I(y��)�C���� | �����ɶȹ��I(y��)�C����ER3-600�� | 1 | �� |
| 3 | ģ�M������ģ�K | ģ�M���H�C�������ϡ� | 1 | �� |
| 4 | ܉�EӖ��ģ�K | ����TCPУ�c�������Ρ��A�Ρ����Ρ����g���ྀ�ν̌W܉�E���ܡ� | 1 | �� |
| 5 | ���\�a��ģ�K | �������Ϻʹa��ɂ�ƽ�_�� | 1 | �� |
| 6 | ��ȫ���o | �b�а�ȫ��ţ����C������ȫ | 1 | �� |

1�����I(y��)�C����ϵ�y(t��ng)
1)������ͣ����P��(ji��)�ͣ�
2)����Ӱ돽��≥590mm��
3)�ֲ����ؓ�d����6�S����≥3KG
4)�C����������≤27kg��
5) �����S��(sh��)≥6�S��
6)�ӷ�ʽ�������ŷ��ӣ�
7) �؏Ͷ�λ���ȣ�≤±0.02mm��
8) �S�\�ӣ��S��������
J1���D�S≥+170°�� -170°
J2�����S≥+ 85°�� -135°
J3�M���S≥+ 185°�� - 65°
J4���S≥+ 190°�� - 190°
J5��[�S≥+ 130°�� - 130°
J6���D�S≥+ 360°��- 360°
9)�S�\���ٶȣ�
J1���D�S≥375°/s
J2�����S≥300°/s
J3�M���S≥419°/s
J4���S≥460°/s
J5��[�S≥460°/s
J6���D�S≥600°/s
10)ʾ�̺�:�ߴ�≤6���ɫҺ��
11) �C���˱��C������ϵ�y(t��ng)���ӡ�늙C��ͬһ���a֪��Ʒ�ơ�
2�����I(y��)�C���ˌ�Ӗƽ�_
ƽ�_��ģ�M����ģ�K��ģ�M������ģ�K�����\�a��ģ�K��܉�EӖ��ģ�K�M�ɣ��C����ͨ�^��(zh��)��ĩ�˹�����������Ą������_�ܳߴ�1500mm×1200mm×750mm���b�а�ȫ��ţ������֟o����Խ�^��ȫ��ţ��C��������ֹͣ����������������ȫ��

a)��ܞ�ߏ����X�ͲĽY�����_�����ܲ��Ã�(y��u)�|䓰���]�����懊Ϳ̎����
b)��Ӗ�_�b�а��o��ָʾ�����քe��"����"��"ֹͣ"���o��ָʾ��������?gu��)�һ����ͣ���o��
c)�_����X�ͲĽY��������T�Ͳ۷����ڰ��b�C���˻�������(zh��)�ЙC����
d)��Ӗ�_�b���f��݆�������Ƅӡ�
3����Ӗƽ�_����ϵ�y(t��ng)
3.1���C���˶�܌�Ӗ�A��
ʹ�ö�܌�Ӗ�A�ߵă�(y��u)�c��ֻ��Ҫͨ�^׃�Q�C������צ�ˑB(t��i)���Ɍ��F(xi��n)��ģ�M���íh(hu��n)����ģ�M�����c���̣����γߴ磺120*120*180mm,����2KG���߂����o�������F(xi��n)�a��ܣ����F(xi��n)�A������ģ�M�����ϵĹ��ܣ�ͬ�r����܉�E���P��
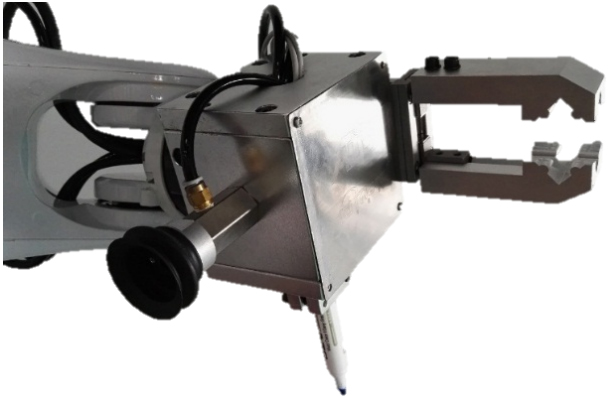
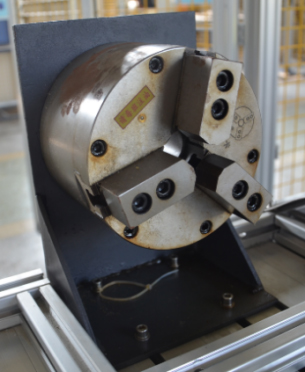
3.2��ģ�M������ģ�K
ԓ����վģ�M���H���S�еęC�������ϣ��ɚ����צ���P���̶�֧�ܡ������צ�����ϼܽM�ɣ��W�������ʵ�����܉�E�������˽�C�������Ϲ�ˇ���̡�
3.3�����g܉�EӖ��ģ�K
ģ�K���w�_�ܲ��Ϟ郞(y��u)�|�X�Ͳģ�һ�w�����ɲ��P䓰��Ƴɣ����渲�wPVCĤ������TCP�˶����ߣ��Ɍ��F(xi��n)�C���˹���TCP�˶����������F(xi��n)����܉�E���̾������ṩ�����Ρ����Ρ��A�μ��ྀ�ΈD�Σ�Ӗ����ͬ�ľ���ָ����F(xi��n)��ƽ�漰���g���s�̌W܉�E��

3.4�����\�a��ģ�K
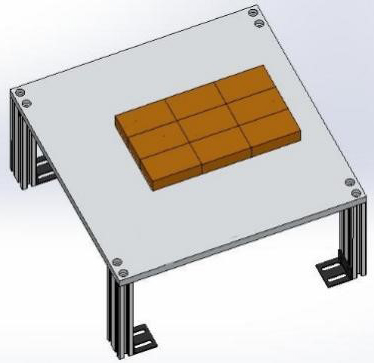
����Ԫ���X����X�ͲĽM���Ƴɣ��ߴ��300*200*150mm���a���ωK���������|���γߴ��80*40*20���ɸ���(j��)���Ҫ��a���N��ʽ��
�ɴa����Π


3.5�����
�錍Ӗ�O���ṩ���Ě�Դ�����ݔ������/�D�٣�550W/1400r/min�����Ӊ������\���У���0.45mpa(0.1��0.8pa���{������: ≤65dB�o�����������o�ͿՉ��C��

4����ȫ���

�aƷ���ԣ�
�� ȫ���ԙz�����Ç��H���M���g��
�� �����Ժã����ܷ�(w��n)����
�� �߷ֱ��ʣ��ɱ��o���ơ����w��
�� ���b��ʽ���ζ��ӣ�
�� ���S�������ף�
�� ���⡢늴Ÿɔ_����
�� �����OӋ��
�� 푑��r�g�̣��ɿ��Ըߣ�
�� �w�eС�ɡ�
5���������
| ��̖ | ���Q | Ʒ����Ҏ(gu��)�� | ��λ | ��(sh��)�� | |
| 1 | ��Ӗƽ�_ | ���|���Y���������X�Ͳġ� | �T�� | �� | 1 |
| 2 | �C����ϵ�y(t��ng) | �C���˱��w | ER3-600 | �_ | 1 |
| �C���˿����� | ������ | �_ | 1 | ||
| �C����ʾ���� | ������ | �� | 1 | ||
| 3 | ģ�M������ģ�K | ��ӿ��P | �T�� | �� | 1 |
| �����צ | �T�� | �� | 1 | ||
| ���� | �T�� | �� | 2 | ||
| 늴��y | 4V310-08 | �� | 1 | ||
| 4 | ܉�EӖ��ģ�K | TCP�˶����F | �T�� | �� | 2 |
| ܉�Eƽ�_ | �T�� | �� | 1 | ||
| �~�|����ʽ�����P | �T�� | �� | 2 | ||
| 5 | ģ�M���\�a��ģ�K | �a��ƽ�_ | �T�� | �� | 1 |
| �a��� | �T�� | �� | 10 | ||
| ������P | ZPT25HBNJ10-B01-A18 | �� | 1 | ||
| ��հl(f��)���� | ZH05B-01 | �� | 1 | ||
| 늴��y | 4V210-08 | �� | 1 | ||
| 6 | ��� | �T�� | ÿ��Ӗ��1�_ | �_ | 1 |
| 7 | ��ȫ���o | ��ȫ��� | ���C������ȫ | �� | 1 |

���ܽ����C����
| ���Q | Ԕ�����g����(sh��) | ||
| ����ϵ�y(t��ng)��̎�������ȴ����� | |||
| �Ŀ | ����ע | ||
| ����ϵ�y(t��ng) | android��6.0�� | ||
| �Z��֧�� | ���� | �� | |
| ̎������� | RK3399ģ�M | �pCortex-A72+��Cortex-A53 ��С��CPU�Y�������l����_1.8GHz | |
| ���Õr� | RTC | �� | |
| �ȴ�DDR | 4g LPDDR3 | �� | |
| �Ƚ�NAND FLASH | 32GB/EMMC | �� | |
| USB�{ԇ�� | micro usb�ӿ� | usb2.0 | |
| �_�C���I1 | �_�C�I | �� | |
| ��ͣ���I | һ�Iͣ�I | ���늙C�Դ��늣��C���˞��Ƅ�݆��߀���܄� | |
| �@ʾ�� | 13.3��TFT�ֱ���1920*1080edp�ӿ� | �� | |
| 13���|���� | 13.3����ݸБ�ʽ�|�� | �� | |
| MIC | 6MICʰ�������ÿƴ�Ӎ�w | �� | |
| ���� I/O �˿� | 1�� USB 2.0 (MICROUSB�� | �� | |
| �z���^ | USB300�f���� | ���x | |
| �����C�R�e�� | ���څf(xi��)�hģ�M | ���x | |
| ��ӡ�C | USB�f(xi��)�hģ�M��ӡ�C | ���x | |
| �P�� | 2*8Ω/5W�������ȡ� | �� | |
| �o�����gAP6210 | ֧��2.4 WIFI&BT4.1 802.11b/g/n�o������W, | �� | |
| ROS����Ҏ(gu��)�� | |||
| ����ϵ�y(t��ng) | LINUX | �� | |
| ̎������� | �������C��X����ِ��PCBA | �� | |
| Ӳ�P | 32G���ٹ̑B(t��i)Ӳ�P | �x���ٶȿ죬�����Ӹɔ_ | |
| 늙C�� | 5.5��݆ݞ늙C | �� | |
| ���݃x | 9 �S�߾����ˑB(t��i)������ | �� | |
| �ξ��������_ | ���Ⲩ�L905 nm�����^(q��)��270�� | �� | |
| 4G·�����D2.4GWIFI | 4GCPE-M6 | ���x | |
| һ�w���� | DYP-ME007YY-RM01_V1.0 | �� | |
| WIFIģ�M | ֧��2.4 WIFI&BT4.1 802.11b/g/n�o������W, | �� | |
| MCU��ǻ�Դ�� | �����ֶ�C�Դ����ָ��C�Դ���c�^��C�Դ����ӡ�C�Դ��CLASS D��š����� | �� | |
| ��MCU�Դ�� | �Դ��ݔ��12V��5V,/���ݔ�����5A��3.3Vݔ��1A��늙C�����·������ | �� | |
| 늳���� | 늳ؽM10S8P ����10400 mAh/37V | �� | |
| 늳�ʹ�Õr�g | 6С�r-8С�r | �� | |
| ��늷�ʽ | �Ԅӻس䡢DCֱ�� | �C�����Ԅӻس�늘���늡�����ֱ�Ӳ��m������� | |
| ��늘�����(sh��) | �^�����o�����ܔ�늡�ݔ���~��늉���42VDC��ݔ���~�������2A | Ĭ�J��B(t��i)�³�늘��ǔ�늠�B(t��i)��ֻ���ڙC���˻س�ĕr��ŕ����_�Դ����ֹ����������r | |
| �Դ�m���� | ݔ�룺AC100-240V.50-60HZ�� ݔ���� DC42V 3A | �� | |
| �aƷ���� | 40Kg��40Kg�������b | �� | |