
�D4-1�Ǵ�������ϵ�y�ķ���D��ԓϵ�y���������ɂ����ƻ�·���������{�����മ�������������{�������Լ������Ľo��ֵR������ݔ��m1���鸱�{�����Ľo��ֵ�����{������ݔ��m2���ƈ��������Ը�׃������C1��
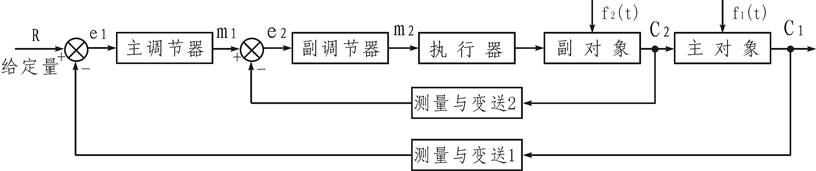
�D4-1 ��������ϵ�y����D
R-�������Ľo��ֵ�� C1-���ص������� �� C2-��������
f1(t)-�������������ϵĔ_�ӣ� f2(t)-�����ڸ������ϵĔ_�ӡ�
������������ϵ�y�����c
��������ϵ�y���丱��·��ϵ�y�����|����Ӱ��������P�n���н�B���ڴˌ����P�YՓ�ٺ��Κw�{һ�¡�
1���������^�̵ĄӑB���ԣ�
2���ܼ��r�˷��M�븱��·�ĸ��N���Δ_�ӣ������ϵ�y���_��������
3�������ϵ�y�������ԣ�
4������һ�������m��������
�����������{��������Ҏ�ɵ��x��
�ڴ�������ϵ�y�У��������{��������������Dz�ͬ�ġ����{������ֵ�������ã����Ŀ����΄���ʹ���������ڽo��ֵ���o������һ���˲���PI��PID�{���������ڸ���·��һ���S��ϵ�y������ݔ��Ҫ���ܿ��١��ʴ_�؏ͬF���{����ݔ����̖��׃��Ҏ�ɣ����������ĄӑB���ܺ����o�����Ҫ��������{�����ɲ���P��PI�{������
�ġ��������{�������������÷�ʽ���x��
����λ�·����ϵ�y�OӋ��������Ҫʹһ���^�̿���ϵ�y������������ϵ�y��횲���ؓ���������ڴ�������ϵ�y���f���������{���������������÷�ʽ���x��ԭ�t��ʹ����ϵ�y����ؓ����ϵ�y��������ͨ�����h���Ŵ�ϵ���O�Գ˷e��횞���ֵ��
���h���ķŴ�ϵ���O�����@��Ҏ���ģ����y��ֵ���ӣ��{������ݔ��Ҳ���ӣ��t�{�����ķŴ�ϵ��Kc��ؓ�����������{����������֮��Kc���������������{�����������b������늄�늄��{���y�ķŴ�ϵ��Kv����������^�̵�ݔ������r�����{�����_����ݔ��Ҳ���t�^�̵ķŴ�ϵ��K0��������֮K0��ؓ��
�塢��������ϵ�y����������
�ڹ��̌��`�У���������ϵ�y���õ������������������N��
��һ�� �ƽ���
���^�ƽ���������������·���_����r�£����Նλ�·������������ȡ���{����������������Ȼ���{�����ą����O��������Ĕ�ֵ�ϣ�ʹ����·�]�ϣ����λ�·����������ȡ���{�����������������������{���������O������õĔ�ֵ�ϣ����M����������ȡ�ڶ��θ��{��������������ֵ��Ȼ�����������{������������ƣ��ƽ���ֱ���M���|��ָ��Ҫ���ֹ��
������ �ɲ�������
�ɲ����������ǵ�һ���������{�����������ڶ����������{����������
�����ľ��w���E�飺
1���ڹ��r����������·�]�ϣ��������{�������ڼ��������×l���£����{�����ı���������100%��Ȼ���Æλ�·����ϵ�y��˥�p����4��1������������������·��ӛ�������ı�����δ2S����ʎ����T2S��
2�������{�����ı�������������õ�δ2Sֵ�ϣ��ҰѸ���·��������·�е�һ���h������ͬ�ӷ�����������·����ȡ����·�ı�����δ1S����ʎ����T1S��
3��������ȡ��δ1S��T1S��δ2S��T2Sֵ�����λ�·ϵ�y˥�p������������ʽӋ���������{�����ı�����δ���e�֕r�gTI���֕r�gTd�Ĕ�ֵ��
4����“�ȸ�����”��“�ȱ�����e�������”�����������O���������{�����ą��������^���^���^����������Ҫ�r�M���m���{����ֱ���^�̵ĄӑBƷ�|�_���M���ֹ��
������ һ��������
���ڃɲ�������Ҫ����ɂ�4��1��˥�p�^�̣��@��һ���ܻ��r�g���¡�������ɲ����������˺����������һ�������������^һ�������������Ǹ�������ȴ_�����{�����ą�����Ȼ����·��������·��һ���h�������λ�·��������ϵ�y�����������������{�����ą�����
���w���������E�飺
1���ڹ��r������ϵ�y�鼃�������õ���r�£�����K02/δ2��0.5�@һ�Pϵʽ��ͨ�^���^�̷Ŵ�ϵ��K02����ȡ���{�����ı����Ŵ�ϵ��δ2����xȡ���������O���ڸ��{�����ϡ�
2�����Նλ�·����ϵ�y����һ�N���������������������{�����ą�����
3����׃�o��ֵ���^�챻��������푑��������������{�����Ŵ�ϵ��K1 ���{�����Ŵ�ϵ��K2��ƥ��ԭ�����m���{���{�����ą�����ʹ������Ʒ�|ָ����ѡ�
4��������F�^�����ʎ�F��ֻҪ�Ӵ����{�����ı�����δ������e�֕r�g����TI�����ɵõ����ơ�