
�λ�·����ϵ�y(t��ng)�ĸ���
һ���λ�·����ϵ�y(t��ng)�ĸ����D3.1��λ�·����ϵ�y(t��ng)����D��һ����ʽ�������ɱ��،���(zh��)�������{(di��o)��(ji��)���͜y��׃�����M��һ�����]�h(hu��n)����ϵ�y(t��ng)��ϵ�y(t��ng)�Ľo������ijһ��ֵ��Ҫ��ϵ�y(t��ng)�ı���������(w��n)�����o�����������@�Nϵ�y(t��ng)�Y(ji��)��(g��u)���Σ������^�ã��{(di��o)ԇ����ȃ�(y��u)�c�����ڹ��I(y��)���a(ch��n)���ѱ��V����(y��ng)�á�

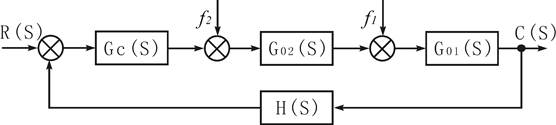
�D2.2.1 �λ�·����ϵ�y(t��ng)����D
�����ɔ_��ϵ�y(t��ng)���ܵ�Ӱ�
1���ɔ_ͨ���ķŴ�ϵ��(sh��)���r�g����(sh��)��������ϵ�y(t��ng)��Ӱ푡�
�ɔ_ͨ���ķŴ�ϵ��(sh��)Kf��Ӱ푸ɔ_����ϵ�y(t��ng)�еķ�ֵ����ϵ�y(t��ng)���в�ϵ�y(t��ng)���t�ɔ_ͨ���ķŴ�ϵ��(sh��)����ϵ�y(t��ng)���o��Ҳ������
����ɔ_ͨ����һ�T�ԭh(hu��n)��(ji��)����r�g����(sh��)��Tf���t�A�S�_��ͨ�^�T�ԭh(hu��n)��(ji��)�����^���^�̵ĄӑB(t��i)�������V������ֵ׃С�����r�g����(sh��)TfԽ�tϵ�y(t��ng)�ĄӑB(t��i)ƫ�����С��
ͨ���ɔ_ͨ����߀���м�����h(hu��n)��(ji��)����ʹ���{(di��o)����(sh��)��푑�(y��ng)�r�g����һ��τֵ��������Ӱ�ϵ�y(t��ng)���{(di��o)��(ji��)�|(zh��)����
2���ɔ_�M��ϵ�y(t��ng)�еIJ�ͬλ�á�
��(f��)�s�����a(ch��n)�^�������ж����ɔ_��������������ϵ�y(t��ng)�IJ�ͬλ�ã���D3-2��ʾ��ͬһ��ʽ����С��ͬ�Ĕ_��������ϵ�y(t��ng)�в�ͬ��λ�����a(ch��n)�����o���Dz�һ�ӵġ����_�Ӯa(ch��n)��Ӱ푵ăH�ǔ_�������cǰ����Щ�h(hu��n)��(ji��)��
�D3.2 �_�������ڲ�ͬλ�õĿ���ϵ�y(t��ng)
��������Ҏ(gu��)�ɵ��x��
PID����Ҏ(gu��)�ɼ��䌦ϵ�y(t��ng)�����|(zh��)����Ӱ��������P(gu��n)�n���н�B���ڴˌ����P(gu��n)�Y(ji��)Փ�ٺ��Κw�{һ�¡�
1������(P)�{(di��o)��(ji��)
�������{(di��o)��(ji��)����һ�N��ε��{(di��o)��(ji��)���������������ú͔_�����õ�푑�(y��ng)���ܿ졣���ڱ����{(di��o)��(ji��)ֻ��һ������(sh��)�����������ܷ��㡣�@�N�{(di��o)��(ji��)������Ҫȱ�c��ϵ�y(t��ng)���o����ڡ�����f����(sh��)�飺
GC(s)= KP =
ʽ��KP�����ϵ��(sh��)��δ���������
2�������e��(PI)�{(di��o)��(ji��)
PI�{(di��o)��(ji��)����������P�{(di��o)��(ji��)���ٵ����ɔ_��Ӱ푣�ͬ�r����I�{(di��o)��(ji��)���������I�{(di��o)��(ji��)������ϵ�y(t��ng)�ķ�(w��n)���ԣ��@�N�{(di��o)��(ji��)�����^�̿������Ǒ�(y��ng)������һ�N�{(di��o)��(ji��)��������f����(sh��)�飺GC(s)=KP(1+
ʽ��TI��e�֕r�g��
3��������(PD)�{(di��o)��(ji��)
�@�N�{(di��o)��(ji��)���������ֵij�ǰ���ã�������ϵ�y(t��ng)�ķ�(w��n)���ȣ��ӿ�ϵ�y(t��ng)���{(di��o)��(ji��)�^�̣��pС�ӑB(t��i)���o�B(t��i)�`����ֿ��ɔ_�����^������^����(d��o)��늄��{(di��o)��(ji��)�y������ɶ�͡����һ�㲻����������Һλ����ϵ�y(t��ng)��PD�{(di��o)��(ji��)���Ă��f����(sh��)�飺 GC(s)=KP(1+TDs)��
ʽ��TD���֕r�g��
4�������e����(PID)�{(di��o)��(ji��)��
PID�dz�Ҏ(gu��)�{(di��o)��(ji��)����������õ�һ�N�{(di��o)��(ji��)�������������и���{(di��o)��(ji��)���ă�(y��u)�c�����ʹϵ�y(t��ng)���и��ߵĿ����|(zh��)�������Ă��f����(sh��)��
GC(s)=KP(1+
�D3-3��ʾ��ͬһ��������ͬ�A�S�_���£����ò�ͬ����Ҏ(gu��)�ɕr������ͬ˥�p�ʵ�푑�(y��ng)�^�̡�

�D3.3 ���N����Ҏ(gu��)�Ɍ���(y��ng)��푑�(y��ng)�^��
�ġ��{(di��o)��(ji��)������(sh��)����������
�{(di��o)��(ji��)������(sh��)������һ���ЃɷN������һ�N����ՓӋ�㷨��������(j��)�V�x����Ĕ�(sh��)�W(xu��)ģ�ͺ�����Ҫ���ø�܉�E�����l�����Է����_���{(di��o)��(ji��)�������P(gu��n)����(sh��)����һ�N�����ǹ��̌���ͨ�^������ݔ��푑�(y��ng)�������õ�����������Ȼ����ս�(j��ng)��������{(di��o)��(ji��)�������P(gu��n)����(sh��)�����̌���������������ķN��
��һ����(j��ng)
����ϵ�y(t��ng)����Һλ���������ضȺ͉����ȅ���(sh��)������t����ͬһe��ϵ�y(t��ng)���䌦���������^�ӽ������ԟoՓ�ǿ�������ʽ߀���������ą���(sh��)�������������3-1�齛(j��ng)��������(sh��)�ą�����(sh��)��(j��)���ڴ˻��A(ch��)�ϣ����{(di��o)��(ji��)���ą���(sh��)���Mһ������������������ã��֕r�g����(sh��)��TD=(
��3-1 ��(j��ng)��������(sh��)
| ϵ �y(t��ng) | �� ��(sh��) | ||
| δ(%) | TI(min) | TD(min) | |
| �� �� | 20��60 | 3��10 | 0.5��3 |
| �� �� | 40��100 | 0.1��1 | |
| �� �� | 30��70 | 0.4��3 | |
| Һ λ | 20��80 | ||
�@�N�������������]�h(hu��n)��r���M�еġ��O(sh��)TI=∞��TD=0��ʹ�{(di��o)��(ji��)�������ڼ�������r�£����������ɴ���u׃С��ʹϵ�y(t��ng)��ݔ��푑�(y��ng)�ʬF(xi��n)�ȷ���ʎ����D3.4��ʾ������(j��)�R�������δk����ʎ����TS������3-2���еĽ�(j��ng)���ʽ����ȡ�{(di��o)��(ji��)���ą�������(sh��)ֵ���@�N�����������Եõ�4��1˥�p��Ŀ��(bi��o)��
��3-2 �R������ȷ������{(di��o)��(ji��)������(sh��)
|
�{(di��o)��(ji��)������(sh��) �{(di��o)��(ji��)�����Q |
δ | TI(S) | TD(S) |
| P | 2δk | ||
| PI | 2.2δk | TS/1.2 | |
| PID | 1.6δk | 0.5TS | 0.125TS |
˥�p��������������ʎ����
���]�h(hu��n)ϵ�y(t��ng)�У��Ȱ��{(di��o)��(ji��)���O(sh��)�Þ鼃�������ã�Ȼ��ѱ������ɴ���u�pС�����A�S�_���^��ݔ��푑�(y��ng)��˥�p�^�̣�ֱ�����F(xi��n)�D3-5��ʾ��4��1˥�p�^�̞�ֹ���@�r�ı����ȷQ��4��1˥�p�����ȣ���δS��ʾ֮�������ɲ����g�ľ��x�Q��4��1˥�p����TS������(j��)δS��TS���\�ñ�3-3��ʾ�Ľ�(j��ng)ʽ���Ϳ�Ӌ����{(di��o)��(ji��)���A(y��)�����ą���(sh��)ֵ��
��3-3 ˥�p������Ӌ�㹫ʽ
|
�{(di��o)��(ji��)������(sh��) �{(di��o)��(ji��)�����Q |
�%�� | TI(min) | TD(min) |
| P | δS | ||
| PI | 1.2δS | 0.5TS | |
| PID | 0.8δS | 0.3TS | 0.1 TS |
���^�ӑB(t��i)���ԅ���(sh��)�������Ǹ���(j��)ϵ�y(t��ng)�_�h(hu��n)�V�x�^���A�S푑�(y��ng)�����M�н���Ӌ��ķ�����������(j��)�ڶ����Ќ������Ե��A�S푑�(y��ng)�����yԇ���y��ϵ�y(t��ng)�ĄӑB(t��i)���ԅ���(sh��)��K��T��τ�ȣ������ñ�3-4��ʾ�Ľ�(j��ng)ʽ���Ϳ�Ӌ�������(y��ng)��˥�p�ʞ�4��1�r�{(di��o)��(ji��)�������P(gu��n)����(sh��)��������،�����һ�A�T�ԭh(hu��n)��(ji��)������к�С�����һ�A�T�ԭh(hu��n)��(ji��)�������R������ȷ���������ʎ����4��1˥�p�������y�ȣ��˕r��(y��ng)���ÄӑB(t��i)���ԅ���(sh��)���M��������
��3-4 ��(j��ng)�Ӌ�㹫ʽ
|
�{(di��o)��(ji��)������(sh��) �{(di��o)��(ji��)�����Q |
�%�� | TI | TD |
| P |
|
||
| PI |
1.1 |
3.3τ | |
| PID |
0.85 |
2τ | 0.5τ |