
һ����ӖĿ��
(1) �˽Ⲣ��Ϥ�p�]�h(hu��n)���ஐ��늙C�{���{��ϵ�y(t��ng)��ԭ�����M�ɡ�
(2) �˽��D�Ӵ������@��ʽ����늙C���{��(ji��)����늉��{�ٕr�ęCе���ԡ�
(3) ͨ�^�y��ϵ�y(t��ng)���o�B(t��i)���Ժ̈́ӑB(t��i)���ԣ��Mһ���˽⽻���{��ϵ�y(t��ng)������h(hu��n)���D�٭h(hu��n)�����á�
(4) ��ߌ�ϵ�y(t��ng)���������Ϸ���̎��������
������Ӗ������������
| ��̖ | �͡�����������̖ | �� ע |
| 1 | GDQ01�Դ������ | |
| 2 | DK03 ���l�����· | |
| 3 | DK04���ྦྷ�l���|�l(f��)�· | |
| 4 | DK06늙C�{�ٿ����·I | |
| 5 | DQ29-2 ���{����� | |
| 6 | DQ03-1늙C��܉���y��ϵ�y(t��ng)����(sh��)�@�D�ٱ� | |
| 7 | DQ07-1 ֱ���l(f��)늙C | |
| 8 | DQ11 ���ྀ�@ʽ����늄әC | |
| 9 | GDQ12 ���@ʽ����늙C�D�ӌ����� | |
| 10 | ������ʾ���� | �Ԃ� |
| 11 | �f�ñ� | �Ԃ� |
������Ӗ��·��ԭ��
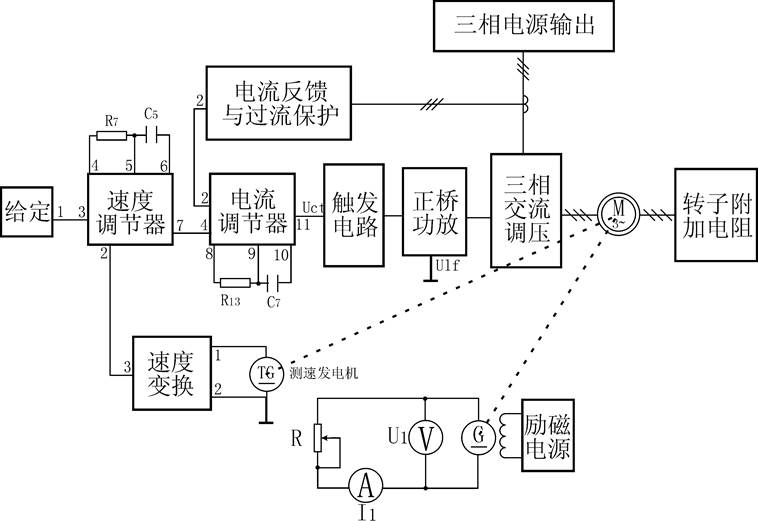
�D4-10 �p�]�h(hu��n)���ஐ��늙C�{���{��ϵ�y(t��ng)ԭ��D
����늄әC�����{���{�ٕr������ͬ���D�ٲ�׃�͙Cе�����^Ӳ����ˌ���ͨ����늄әC���f���{�ٷ��������ޣ��o���Ãrֵ����������늙C���@ʽ����늄әC���D���д����m������ʹ�Cе����׃ܛ���{�ٷ��������U����ؓ�d��늾W(w��ng)늉�������r�£����D�ٲ��Ӈ��أ���˳������p�]�h(hu��n)�{��ϵ�y(t��ng)��
�p�]�h(hu��n)���ஐ��늙C�{���{��ϵ�y(t��ng)�����·�����ྦྷ�l�ܽ����{�����������@��ʽ����늄әC�M�ɡ����Ʋ�����“�{��(ji��)����”�� “�ٶ�׃�Q”��“�|�l(f��)�·”��“�����·”�ȽM�ɡ���ϵ�y(t��ng)ԭ����D��D4-10��ʾ��
�����{��ϵ�y(t��ng)�������ٶȡ�����ɂ��������ƭh(hu��n)���@����ٶȭh(hu��n)���û������cֱ���{��ϵ�y(t��ng)��ͬ��������h(hu��n)�����Ät������ͬ���ڷ�(w��n)���\����r�£�����h(hu��n)��늾W(w��ng)�_�������^��Ŀ��_���ã����چ����^��������h(hu��n)�H�����������������ã��������F(xi��n)��ц��ӵĺ������ԣ�Ҳ�������Ǻ��D�؆��ӡ�
����늄әC�{���{��ϵ�y(t��ng)�Y�����Σ������p�]�h(hu��n)ϵ�y(t��ng)�r�o�����^С���ұ��^�����F(xi��n)�������D�����Ӻ��ܺ��Ƅӡ����ں��D��ؓ�d�²����L�r�g�����\�У�������\�Еr�D��� Ps=SPM ȫ���������D������У�ʹ�D���^�ᡣ
�ġ���Ӗ����
(1) �y�������@��ʽ����늄әC�D�Ӵ����r�ęCе���ԡ�
(2) �y���p�]�h(hu��n)�����{���{��ϵ�y(t��ng)���o�B(t��i)���ԡ�
(3) �y���p�]�h(hu��n)�����{���{��ϵ�y(t��ng)�ĄӑB(t��i)���ԡ�
�塢��Ӗ����
(1)DK03��DK04�ϵ�“�|�l(f��)�·”�{ԇ
�ٴ��_GDQ01���Դ�_�P������“�Դ������”�ϵ�“����늾W(w��ng)늉�ָʾ”
�_�P���^��ݔ�������늾W(w��ng)늉��Ƿ�ƽ�⡣
�ڌ�GDQ01��“����ͬ����̖ݔ��”�˺�DK04“����ͬ����̖ݔ��”�����B,���_DK04�Դ�_�P���܄� “�|�l(f��)�}�_ָʾ”�o���_�P��ʹ“խ”�İl(f��)�������
���^��A��B��C�������X�������{��(ji��)A��B��C������X��б���{��(ji��)�λ�����ڸ��^�y����ȣ���ʹ������X��б�ʱM����һ�¡�
�܌�DK06�ϵ�“�o��”ݔ��Ugֱ���cDK04�ϵ��������늉�Uct��ӣ����o���_�PS2�ܵ��ӵ�λ�ã���Uct=0�����{��(ji��)DK04�ϵ�ƫ��늉��λ�������pۙʾ�����^��A��ͬ��늉���̖��“�p�}�_�^���” VT1��ݔ�����Σ�ʹα=120°��
���m�����ӽo��Ug����늉�ݔ�����^�yDK04��“�}�_�^���”�IJ��Σ��˕r���^�y����խ�}�_���pխ�}�_��
�ތ�DK04����ϵ�Ulf�˽ӵأ���20о�ı�ƽ��|����DK04��“�����|�l(f��)�}�_ݔ��”�˺�DK03“�����|�l(f��)�}�_ݔ��”�����B������DK03“�����|�l(f��)�}�_”�������_�P����“ͨ”���^������VT1��VT6���l���T�O��ꎘO֮�g���|�l(f��)�}�_�Ƿ�������
(2)���Ɔ�Ԫ�{ԇ
���{��(ji��)�����{��
��DK06��“�ٶ��{��(ji��)��”����ݔ��˽ӵأ��Ì�����“5”��“6”�̽ӣ�ʹ“����{��(ji��)��”�ɞ�P (����)�{��(ji��)�����{��(ji��)����ϵ��{���λ��RP3�����f�ñ��ĺ����n�y������{��(ji��)��“7”�˵�ݔ����ʹ�{��(ji��)����ݔ��늉��M���ܽӽ����㡣
��DK06��“����{��(ji��)��”����ݔ��˽ӵأ��Ì�����“9”��“10”�̽ӣ�ʹ“����{��(ji��)��”�ɞ�P���������{��(ji��)�����{��(ji��)����ϵ��{���λ��RP3�����f�ñ��ĺ����n�y������{��(ji��)����“11”�ˣ�ʹ�{��(ji��)����ݔ��늉��M���ܽӽ����㡣
���{��(ji��)������ؓ��ֵ���{��
ֱ�ӌ�DK06�Ľo��늉�Ug����DK04�������늉�Uct��ݔ��ˣ����ཻ���{��ݔ���������·��һ���ؓ�d��DQ29-2���{���������������ֵ���λ�ã���ʾ�����^��ݔ����늉����Ρ����o��늉�Ug�����{��r��ݔ��늉�U�S�o��늉������������Ug���^ijһ��(sh��)ֵUg���r��U �IJ��νӽ����Ҳ��r��һ��ɴ_���������늉���������SֵUctmax=Ug������Ug�����S�{��(ji��)������0��Uctmax��ӛ�Ug�����±��У�
| Ug�� | |
| Uctmax=Ug�� |
��“����{��(ji��)��”��“9”��“10”�̽Ӿ�ȥ����ʹ�{��(ji��)���ɞ�PI�������e�֣��{��(ji��)����Ȼ��DK06�Ľo��ݔ���˽ӵ�����{��(ji��)����“4”�ˣ��������o���r���{��ؓ���λ��RP2��ʹ֮ݔ��늉�����Сֵ���ɣ����{��(ji��)��ݔ��˼�ؓ�o���r���{�������λ��RP1��ʹ����{��(ji��)����ݔ��������Uctmax��
���������������
ֱ�ӌ�DK06�Ľo��늉�Ug����DK04�������늉�Uct��ݔ��ˣ�����220V�����A�࣬B�࣬C�ཛ(j��ng)�^DK06�ϵ�“���������”�����B�ӵ�DK03�ϵ����·ݔ�룬���׃�Q����ݔ��“TA1��TA2��TA3”�o��ӣ��Ȳ��ѽӵ��·�壩�����ཻ���{��ݔ�������ྀ�@ʽ����늄әC���y�����ྀ�@ʽ����늄әC��������ֵ���������늉����{��(ji��)“��������c�^�����o”�ϵ���������λ��RP1��ʹ���Ie=0.5A�r���������늉���Ufi=3V��
���D�ٷ���������
ֱ�ӌ�DK06�Ľo��늉�Ug����DK04�������늉�Uct��ݔ��ˣ�ݔ�������ྀ�@ʽ����늄әC���y��늄әC���D��ֵ���D�ٷ���늉�ֵ���{��(ji��)“�ٶ�׃�Q”�λ��RP1��ʹn =1300rpm�r���D�ٷ���늉���Ufn=-6V��
(3)�C���n =f(T)�y��
�ٌ�DK06��“�o��”늉�ݔ��ֱ�ӽ���DK04�ϵ��������늉�Uct��늙C�D�ӻ�·��GDQ12�D����茣���䣬ֱ���l(f��)늙C��ؓ�d���R (DQ29-2���{��裬���ɂ�900Ω�ӳɴ�(li��n)��ʽ)�������o����ݔ���{���㡣
��ֱ���l(f��)늙C���p�d���{��(ji��)�D�ٽo��늉�Ugʹ늄әC�Ķ�늉�=Ue��
�D�ؿɰ���ʽӋ��:
ʽ�У�T�����ྀ�@ʽ����늙C늴��D�أ�IG��ֱ���l(f��)늙C�����UG��ֱ���l(f��)늙C늉���Ra��ֱ���l(f��)늙C늘���裬Po��C�M���d�p�ġ�
���{��(ji��)Ug������늄әC��늉�����2/3Ue�r�؏���������ȡ��һ�M�Cе���ԡ�
��ݔ��늉���Ue�r��
| n(rpm) | |||||||
| U2=UG (V) | |||||||
| I2=IG��A�� | |||||||
| T(N·m) |
| n(rpm) | |||||||
| U2=UG (V) | |||||||
| I2=IG��A�� | |||||||
| T(N·m) |
�ٴ_��“����{��(ji��)��”��“�ٶ��{��(ji��)��”����ֵ��������D�ٷ����ĘO�ԡ�
�ڌ�ϵ�y(t��ng)�ӳ��p�]�h(hu��n)�{���{��ϵ�y(t��ng)��늙C�D�ӻ�·��ÿ�മ3Ω���ҵ���裬��u����o��Ug���^��늙C�\���Ƿ�������
(5)ϵ�y(t��ng)�]�h(hu��n)���ԵĜy��
���{��(ji��)Ugʹ�D����n=1200rpm�����p�d��һ���g���{���~��ؓ�d���y���]�h(hu��n)�o�B(t��i)����n =f��T��
| n(rpm) | 1200 | ||||||
| U2=UG��V�� | |||||||
| I2=IG��A�� | |||||||
| T(N·m) |
| n(rpm) | 800 | ||||||
| U2=UG (V) | |||||||
| I2=IG (A) | |||||||
| T(N·m) |
��������ʾ�����^��:
��ͻ�ӽo������늙C�r���D��n(“�ٶ�׃�Q”�� “3”��)�����I(“��������c�^�����o”��“2”��) ��“�ٶ��{��(ji��)��”ݔ����“6”�˵ĄӑB(t��i)���Ρ�
��늙C��(w��n)���\�У�ͻ�ӡ�ͻ�pؓ�d(20%Ie<=>100%Ie)�r��n��I�ĄӑB(t��i)���Ρ�
�ˡ������
(1)����(j��)��(sh��)��(j��)�������_�h(hu��n)�r늙C�ęCе����n=f��T����
(2)����(j��)��(sh��)��(j��)�����]�h(hu��n)ϵ�y(t��ng)�o�B(t��i)����n=f��T�������c�_�h(hu��n)�����M�б��^��
(3)����(j��)ӛ��µĄӑB(t��i)���η���ϵ�y(t��ng)�ĄӑB(t��i)�^�̡�
�š�ע�����
(1)�������ٌ��r�����r�g�����^�L������������^��������蔵(sh��)ֵ��׃����
(2)�D��ÿ�മ������3Ω���ң��ɸ���(j��)��Ҫ�M���{��(ji��)���Ա�ϵ�y(t��ng)���^�õ����ܡ�
(3)Ӌ���D��T�r�õ��ęC�M���d�p��Po��5W���ҡ�