
һ���a(ch��n)Ʒ����
���I(y��)�C�����c����ҕ�Xϵ�y(t��ng)���Ì�Ӗƽ�_�Թ��I(y��)�C�����c�C��ҕ�X����ģ����Cе����ӡ��\�ӿ��ơ�׃�l�{�١����a�����g��PLC���Ƽ��g�ЙC���M�����ϣ��Y��ģ�K�������ڽM�ϣ����F(xi��n)�����ق�ݔ���ϵIJ�ͬ�����M�п��ٵęz�y���M�b�����˷��㌍Ӗ�̌W��ϵ�y(t��ng)�M���ˌ��T���OӋ��������ɸ�C���ˆ��Ӗ���;C�����ĿӖ��������ɸ�C���ˆ��Ӗ���;C�����ĿӖ���������M�����S�C����ʾ�̡���λ��ץȡ���b���Ӗ����
���������ɶȹ��I(y��)�C���ˡ�����ҕ�X�z�yϵ�y(t��ng)��PLC����ϵ�y(t��ng)��һ���ϡ�ݔ�͡��b�䡢�}���C�������Ԍ��F(xi��n)�����ق�ݔ?sh��)Ĺ����M�з֒����z�y�����\���b�䡢�惦�Ȳ�����
ԓƽ�_���M�������b���Ͳ������ϣ��Cе�Y����늚���ƻ�·����(zh��)�ЙC���������������ù��I(y��)�˜ʼ��OӋ��ͨ�^��ƽ�_�����M�ЙCе�M�b��늚⾀·�OӋ�c�Ӿ���PLC�����c�{ԇ������ҕ�X���̾������I(y��)�C���˾����c�{ԇ���õȶ��Ӗ�����m���I(y��)ԺУ�������WУ�Ԅӻ�����P���I(y��)�����I(y��)�C�����c���Ƽ��g�������Ԅӻ����g�����n�̵Č�Ӗ�̌W���m���Ԅӻ����g�ˆT�M�й���Ӗ�������ܱ�ِ��
�������g����
1. ݔ���Դ������������220V±10% 50Hz
2. �����h(hu��n)�����ض�-10�桫+40�� �������≤85%��25�棩 ���Σ�4000m
3. �b����������1.5kVA
4. ��Ӗƽ�_�ߴ磺2200mm×1200mm×1500mm
5. ��ȫ���o������©늱��o����ȫ���χ��Ҙ˜�
�����O��Y���c�M��
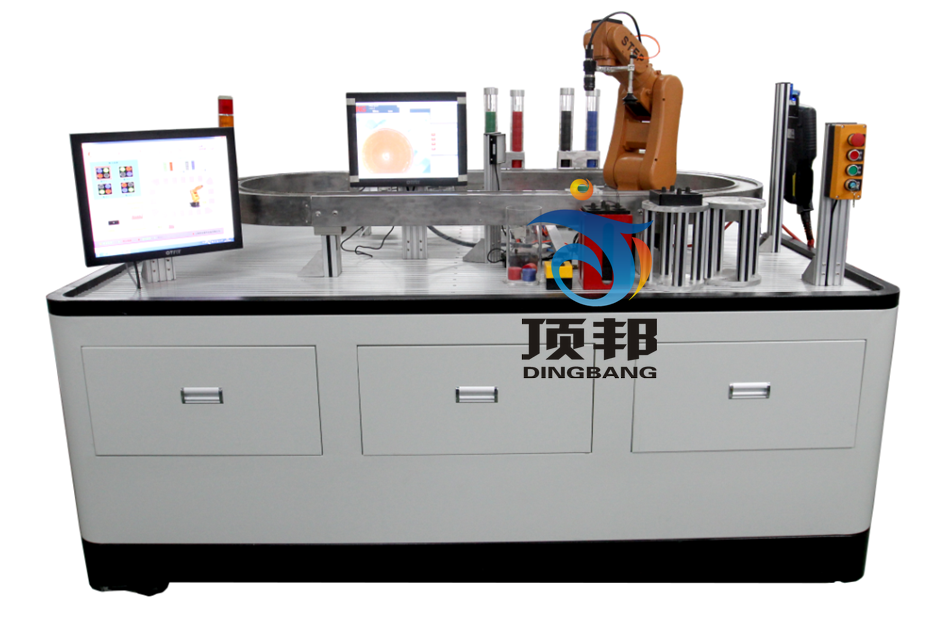
ԓ��Ӗƽ�_��STEP SD500�������ɶȹ��I(y��)�C����ϵ�y(t��ng)���Wķ������ҕ�X�z�yϵ�y(t��ng)���ɾ��̿�������PLC��ϵ�y(t��ng)���Ĺ�λ���φ�Ԫ���h(hu��n)��ݔ�͆�Ԫ�������惦�й��φ�Ԫ�������M�b��Ԫ���}���Ԫ���UƷ����Ͱ����������ͲČ�Ӗ�����Ͳ���X���ȽM�ɡ�
1. �r�_STEP SD500�������ɶȹ��I(y��)�C����ϵ�y(t��ng)
�əC���˱��w���C���˿�������ʾ�̆�Ԫ��ݔ��ݔ����̖�D�Q����ץȡ�C���M�ɣ��b�����P��ҕ�X�z���^�ȣ��Ɍ������M����ȡ�����\���b�䡢�y�������Ȳ�����Ҳ���Ը���(j��)����ҕ�X���C�R�e��ͬ�ɫ�������b�䡣
1) �C���˱��w�������ɶ��P��(ji��)�M�ɣ��̶����ͲČ�Ӗ���ϣ�����6�����ɶȣ���(li��n)�P��(ji��)���I(y��)�C���˰��b��ʽ�������氲�b�����b�����b
2) ��1�S����������+170°/-170°��������D�ٶ�370°/s
3) ��2�S����������+110°/-110°��������D�ٶ�370°/s
4) ��3�S����������+40°/-220°��������D�ٶ�430°/s
5) ��4�S����������+185°/-185°��������D�ٶ�300°/s
6) ��5�S����������+125°/-125°��������D�ٶ�460°/s
7) ��6�S����������+360°/-360°��������D�ٶ�600
8) ���Ĺ����돽��500mm
9) ��Чؓ�d5kg
10) �C����ʾ�̆�Ԫ��Һ���@ʾ����ʹ�ܰ��o����ͣ���o�������I�P�����څ���(sh��)�O�á��ք�ʾ�̡�λ�þ��������Ȳ�����
2. �Wķ������ҕ�X�z�yϵ�y(t��ng)
���һ�ךWķ��FZ5-L350����ҕ�Xϵ�y(t��ng)����ҕ�X����������ɫ��Դ��ҕ�X���C���O(ji��n)ҕ�@ʾ���ȽM�ɡ����ڙz�y���������ԣ��电(sh��)�֡��ɫ���Π�ȣ�߀���Ԍ��b��Ч���M�Ќ��r�z�y������ͨ�^I/O��|�B�ӵ�PLC��C���˿�������Ҳ֧�ִ��п�������̫�W(w��ng)�����B�ӵ�PLC��C���˿����������z�y�Y���͙z�y��(sh��)��(j��)�M�Ђ�ݔ��
3. ���T�ӿɾ��̿�������Ԫ
������T��S7-1200�ɾ��̿��������Ԏ���̫�W(w��ng)ͨӍģ�K����(sh��)�����Uչģ�K���ƙC���ˡ�늙C����Ȉ�(zh��)�ЙC��������̎������Ԫ�z�y��̖�������������̡���(sh��)��(j��)��ݔ?sh��)��΄ա?br style="padding: 0px; margin: 0px;" /> 6. �Ĺ�λ���φ�Ԫ
���ƄӾ�ʽ�ώ졢���Ϛ�ס��o�U���늂������M�ɣ����b���ͲČ�Ӗ���ϣ����ڌ��������еĹ��������Ƴ����h(hu��n)��ݔ�;����ṩ��ͬ�ɫ�Ę˜ʹ������sɫ�B�ӵȲ��ϸ����λ�Ĺ����OӋ��ʹ�ù��Ϸ�ʽ���ӻ��������M�І�һ�����ϣ�Ҳ�����M�в�ͬ�ɫ�ĽM�����ϣ��Լ��������ٶ��M�п��ƣ����F(xi��n)������ʽ�Ķ��ӻ���
7. �h(hu��n)��ݔ�͆�Ԫ
����һ�����{��ϵ�y(t��ng)��������D720׃�l�������ཻ��늙C���h(hu��n)�ΰ�朣����͎��������w�������ȽM�ɣ����b���ͲČ�Ӗ���ϣ����ڂ�ݔ������
8. �����惦�й��φ�Ԫ
����һ�ײ��M늙C�ƗU��DM556���M�ӡ��Ϻд惦�۵ȽM�ɣ����b���ͲČ�Ӗ���ϣ���һ�������惦�б�ȡ�ߕ��Ԅ��˳���һ�������惦�У����ڹ����惦���Ԅӹ��ϡ�
9. �����M�b��Ԫ
�ɹ����惦���бP���Ͳ������M�ɣ����b���ͲČ�Ӗ���ϣ������b�乤���������Ѓ�(n��i)�O��4�����������ڷ��ù������C���˿��Ը���(j��)��ͬ�䷽������λ�C�O���ɫ�M�з��ù�����
10. �}���Ԫ
�ɹ����惦���бP���Ͳ������M�ɣ����b���ͲČ�Ӗ���ϣ��C�������ڷ����b����ĽM���M�жѶ⣬Ҳ����ͨ�^�C���ˌ��b����ɵĽM���M�в�⡣
11. �UƷ����Ͱ
���b���ͲČ�Ӗ�����ȣ����ڙC�����Ԅӷ��ñ��z�y�����ğo�ù����ϸ�Ʒ��
12. ��̫�W(w��ng)·����
��̫�W(w��ng)·������PLC���C���˿�����������ҕ�X�������M��һ����̫�W(w��ng)����W(w��ng)���M�Д�(sh��)��(j��)�����ݔ�����F(xi��n)���I(y��)�F(xi��n)������ϵ�y(t��ng)�ĸߌӴΑ��ã�ͬ�r�������B(y��ng)�Ϳ��ˌW�������I(y��)�W(w��ng)�j��ʹ�ü��ܡ�
�ġ�ܛ����B
1. �C�����{ԇ����ܛ��
���O��ʹ�ÙC���ˌ����{ԇ����ܛ�������Ԍ��C�����M�о��̺��{ԇ��ԓܛ�������ı����^(q��)��λ���б�^(q��)������ָʾ�^(q��)���Ŀ����^(q��)�ȴ��ڣ����Ԍ��C�����M���{ԇ���{ԇ�r�Ɍ��C�����M�����²������������ŷ��_���P���\���ٶ��O�á����P��(ji��)λ�ýo�����\�к�ֹͣ���β���(zh��)��ָ��B�m(x��)��(zh��)��ָ��������D��(zh��)�еȡ�ͬ�rԓܛ���ṩ���ӽӿں���(sh��)���ɹ��Ñ��M�ж����_�l(f��)ʹ�ü��M����ӴΙC���˿��Ƽ��g���о���
2. �����b�����̾�ܛ��
�ṩһ�����O�䌣�õĹ����b�����̾�ܛ����ͨ�^PLC���d���cPLC�M�Д�(sh��)��(j��)��ݔ�����Ԍ��������b�������M���S�⾎�����°l(f��)�oPLC��ÿ�M�����������У�ÿ�������е��Ă���λ�������O�ó���Ҫ�Ĺ��������x��̖���ɫ���߶ȣ���ͬλ�ÿ��x��ͬ������ܛ�����PLC�͙C���˳����F(xi��n)�����b�����̵Ķ��ӻ���
�塢�������
| ��̖ | ���Q | ��Ҫ������������Ҏ(gu��)�� | ��(sh��)�� | ��ע |
| 1. | ��Ӗƽ�_ | 2000mm×1200mm×1400mm | 1�_ | |
| 2. | ���I(y��)�C���� | 6�S���I(y��)�C���˱��w��SD500 | 1�_ | �r�_ |
| �C���˿�������SRC3.1 | 1�� | |||
| 3. | ����ҕ�Xϵ�y(t��ng) | ҕ�X��������FZ5-L350 | 1�_ | �Wķ�� |
| ҕ�X���C��ZFX-SC10 | 1�_ | |||
| 4. | �ɾ��̿�����ϵ�y(t��ng) | PLC���C��S7-1200 CPU 1215C AC/DC/�^��� | 1ֻ | ���T�� |
| ��(sh��)����ݔ��ģ�K��SB1222 4ݔ�� | 1ֻ | |||
| 5. | �����{��ϵ�y(t��ng) | ׃�l����FR-D720S-0.4kW | 1�� | |
| �����p��늙C | ||||
| 6. | ���Mϵ�y(t��ng) | ���M����DM556 | 1�� | |
| ���M늙C��42BYG | ||||
| 7. | ·���� | 4P��̫�W(w��ng)·���� | 1�_ | |
| 8. | ��Ӗģ�K | �Ĺ�λ���φ�Ԫ���h(hu��n)��ݔ�͆�Ԫ�������惦�й��φ�Ԫ�������M�b��Ԫ���}���Ԫ�� | 1�� | |
| 9. | ��� | �o����� | 1�_ | |
| 10. | ��X | H81���� �p��G1840̎���� 2G��(n��i)�� 500GӲ�P���@19.5���@ʾ�� | 1�_ |
1. �C��ҕ�Xϵ�y(t��ng)��ԭ����ʹ�ú��{ԇ
2. ���S���I(y��)�C����ϵ�y(t��ng)��ԭ����ʹ�ú��{ԇ
3. ���S���I(y��)�C��������ϵ�y(t��ng)�͙C��ҕ�X����ϵ�y(t��ng)�˶�����D�Q
4. ���I(y��)�C�����c�C��ҕ�Xϵ�y(t��ng)�C�ϑ��õİ��b�c�{ԇ
5. �C��ҕ�Xϵ�y(t��ng)ģ���O�á������c�{ԇ
6. ͨ�^ʾ�̆�Ԫ�ք��{ԇ���I(y��)�C����
7. ͨ�^ʾ�̆�Ԫ�O�á��ĸ������c����
8. ͨ�^ʾ�̆�Ԫ�������Ĺ��I(y��)�C���˳���
9. �C����ۙ��������
10. ���I(y��)�C����ϵ�y(t��ng)��ܛ�������_�l(f��)����
11.����ҕ�X�D��ݔ�뾎�c�{ԇ
12.����ҕ�X�Y���o�����c�{ԇ
13.����ҕ�X�ɫ�Ȍ��y��
14.����ҕ�X��̖�Ȍ��y��
15.����ҕ�X�ߴ�Ȍ��y��
16.����ҕ�X�ǶȜy��
17. ����ҕ�Xϵ�y(t��ng)�c���I(y��)�C���˾C�ϑ���
18.PLC�����c�{ԇ
19.����ҕ�Xϵ�y(t��ng)�c���I(y��)�C���˾C�ϑ���