���ܽ�ͨ�������̌W(xu��)��Ӗ(x��n)ɳ�P�����ܽ�ͨɳ�P
2024-12-04 07:58
DB-GSS05 ���ܽ�ͨ�̌W(xu��)��Ӗ(x��n)ɳ�P

һ��ɳ�P��B��
���ܽ�ͨ�̌W(xu��)��Ӗ(x��n)ɳ�P���Գ��е�·��ͨ����^(q��)��Ȧ��ԭ�ͣ��C���\�ßo����ݔ�W(w��ng)�j(lu��)����Ƭ�C��RFID���l�R�e���������c��������AI�˹����ܡ�늴Ō�(d��o)���{�����Z������Ӌ��ȼ��g(sh��)�����в����ڌ���ɳ�P�еĂ������c���������o��ͨ��ģ�M��RFIDģ�M�����܌�Ӗ(x��n)С܇�Լ����ܾW(w��ng)�P(gu��n)���O(sh��)�䣬���F(xi��n)���ܽ�ͨ�Ŀ����c�����������W(xu��)����Ϥ���ܽ�ͨϵ�y(t��ng)���P(gu��n)�Ŀ���_�l(f��)�c��(y��ng)�á�
���ܽ�ͨ�̌W(xu��)��Ӗ(x��n)ɳ�P�����ϵ�y(t��ng)�ṩ����(y��ng)�Ĉ����������в��Ì���(y��ng)���ܵĂ������c��(zh��)���������������ɼ�������Ϣͨ�^ZigBee�M�Ђ�ݔ������������(y��ng)��(zh��)������������(y��ng)��ʹ�����ܳ��С��Ԅ��{܇�vۙ��ETÇ�U���ơ����Эh(hu��n)���O(ji��n)�y������·�������П�����ơ���ͨ��ָʾ����(li��n)�W(w��ng)��Ӗ(x��n)����܇�����ܾW(w��ng)�P(gu��n)����(li��n)�W(w��ng)�Ʒ���(w��)����ϵ�y(t��ng)�ں���һ���γ�һ�����������ܽ�ͨģ�͡�
����ɳ�P���c��

���ܽ�ͨ�̌W(xu��)��Ӗ(x��n)ɳ�P��һ���ԾC�ό�Ӗ(x��n)�����Č���ɳ�P��ͨ�^����ͨ��·��·�����t�G�����O(ji��n)�ؔz����վ��ETÇ�U�Լ����ܳ��еȈ�����Y(ji��)�ϣ����F(xi��n)ͨ�^ɳ�P��(n��i)����(li��n)�W(w��ng)ģ�K����������С܇����ڽ�ͨɳ�P��(n��i)��ͬ�������\�У�������ܽ�ͨϵ�y(t��ng)�Č�Ӗ(x��n)��
u ���ܽ�ͨɳ�P���øߏ����X�Ͻ�Ǽܣ����γߴ�1.2m*1.2m*0.25m��
u ���ܽ�ͨɳ�P��������С܇������·��ϵ�y(t��ng)���t�G��ϵ�y(t��ng)�������Z������ϵ�y(t��ng)��������ϵ�y(t��ng)������ϵ�y(t��ng)���t�G��ϵ�y(t��ng)���Ԅ�̧�Uϵ�y(t��ng)�����П���ϵ�y(t��ng)��܇���R�e�Լ�܇�v��λϵ�y(t��ng)������ͨ�^ɳ�P��(n��i)���?z��i)��K�M�вɼ��Ϳ��ƣ�
u ���ܽ�ͨɳ�P����һ�wʽ��늽Y(ji��)��(g��u)������ɳ�Pֻ���B��һ���Դ�����ɣ�ͨ�^һ���Դ�����Ԟ�13·ģ�K��늣�ʡȥ���s�ĽӾ����������ڌW(xu��)��ʹ�ò�����
u ���ܽ�ͨɳ�P���漯��13�����?z��i)��K��ۣ����Ќ���۾����M�д���ʽ�B�ӣ����Ҽ��ɷ���·�O(sh��)Ӌ��֧��������ģ�K��(li��n)�ӌ����چ�֪�R�c�W(xu��)��(x��)�Ļ��A(ch��)�ϣ��M�ж�ģ�K�C�ϑ�(y��ng)�Ì�����ɟo�����оW(w��ng)�j(lu��)���ȶ�N��(f��)�s��(li��n)�W(w��ng)��
u ���ܽ�ͨɳ�P��(n��i)������c��(li��n)�W(w��ng)ģ�K�װ��B�ӣ���ͨ�^��(li��n)�W(w��ng)ģ�Kֱ�ӿ������ܽ�ͨ�ğ���ͣ����a�_Դ��֧�ֶ����_�l(f��)��
u �ṩNewIOT��(li��n)�W(w��ng)���ƽ�_�����ڌ���{(di��o)ԇ�����P(gu��n)��(li��n)�W(w��ng)ģ�K���A(ch��)����
����ɳ�Pϵ�y(t��ng)��
1.����С܇

���܌�Ӗ(x��n)С܇����STM32������̎������С܇���d�ķN��ͬ���\�������Ɍ��F(xi��n)�t�⌤�E��늴Ō��E���t������Լ����ƹ��ܣ�֧�ִ�����eľ���B�ӷ�ʽ���ɴ��䲻ͬ��ģ�K���F(xi��n)��ͬ��Ӗ(x��n)���ܣ�С܇߀����RFID���l�R�eģ�K��ZigBeeͨ��ģ�K�����l��Ƭ�Լ�܇��̖��Ƭ�ȣ��ṩ�_�ŵ�Դ���a�͌�����̡�
2.���ܾW(w��ng)�P(gu��n)�͟o����ݔϵ�y(t��ng)


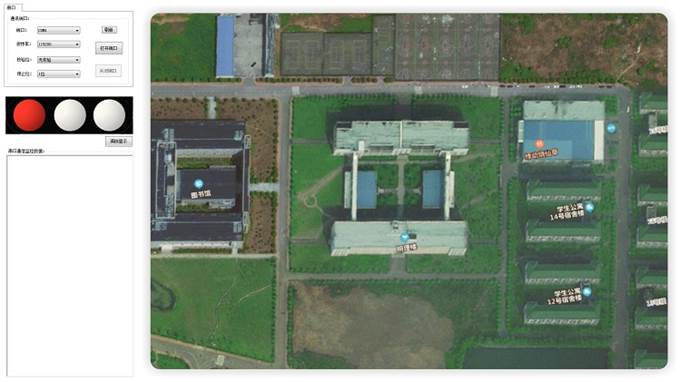
���ܾW(w��ng)�P(gu��n)����ZigBee��WiFi���p�W(w��ng)�P(gu��n)������ϵ�y(t��ng)�ĵӲ���ZigBee���g(sh��)�M�Пo����ݔ������ZigBee�W(w��ng)�P(gu��n)ؓ؟(z��)�B�Ӿ���W(w��ng)����WiFi�W(w��ng)�P(gu��n)ؓ؟(z��)���ɼ��Ă�������Ϣ��ݔ����ƽ�_�ˣ����F(xi��n)�ƶ��@ʾ�Ϳ��ƣ�
3.�����Z������ϵ�y(t��ng)

���������Z������ģ�K��125k���l���x����������(n��i)��125k�x������С܇��(j��ng)�^���xȡ���A(y��)���ڹ���վ�Եĵ��l��Ƭ�r��С܇�R�e��Ƭ��(sh��)��(j��)����������վָ��ͨ�^ZigBee�W(w��ng)�j(lu��)��ݔ?sh��)��Z������ģ�K�ϣ��˕rС܇ֹͣ��������վ��Ϣ�����ӕr�Y(ji��)������С܇������Ϣ��С܇�Ԅӆ��ӣ����F(xi��n)ģ�M�����Ĉ�վ���Ԅӆ�ͣ��
4.����·��ϵ�y(t��ng)

����·��ϵ�y(t��ng)��Ҫ��ģ�M·�����^����������͵��l�x�����M�ɣ�ÿ··���c�^����B�ӣ�С܇�\�Еr�R�e�A(y��)���ڵ�·�µĵ��l��Ƭ����ͨ�^ZigBee�o�����оW(w��ng)�l(f��)���^����_�����P(gu��n)�]��ָ�(li��n)���^����M��·�����Ԅ��_�ϣ��Ķ����F(xi��n)����·������܇���ėl·���ėl·��·�������𣬹�(ji��)�s��Դ��
5.���П���ϵ�y(t��ng)

���П���ϵ�y(t��ng)�ɹ��նȂ��������^�����(zh��)�����Լ���(n��i)���ڽ������(n��i)��LED���M�ɣ����h(hu��n)�����Ƚ��͕r���_���A(y��)�O(sh��)���R��ֵ�r������������Ԅ��������Ȼ֏�(f��)�������������Ԅ�Ϩ�磻
6.��ͨ��̖��ϵ�y(t��ng)
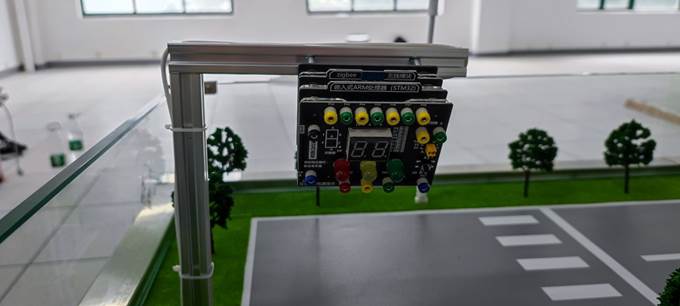
��ͨ��̖��ϵ�y(t��ng)�ɼt�G��ģ�K���t�⌦��ģ�K��������ģ�K�M�ɣ�ͨ�^�������ͽ�ͨ��̖���ąf(xi��)�{(di��o)��ϣ����F(xi��n)С܇�Ԅӆ�ͣ�����˱�����С܇��(j��ng)�^�M�뵽�t�G��·�ڣ����|�l(f��)���������t�G��ģ�K���˕r��̖���Ġ�B(t��i)ͨ�^ZigBee�W(w��ng)�j(lu��)�l(f��)�ͽoС܇��С܇������Ϣ��(zh��)������(y��ng)������
7.ETC�Ԅ�̧�Uϵ�y(t��ng)
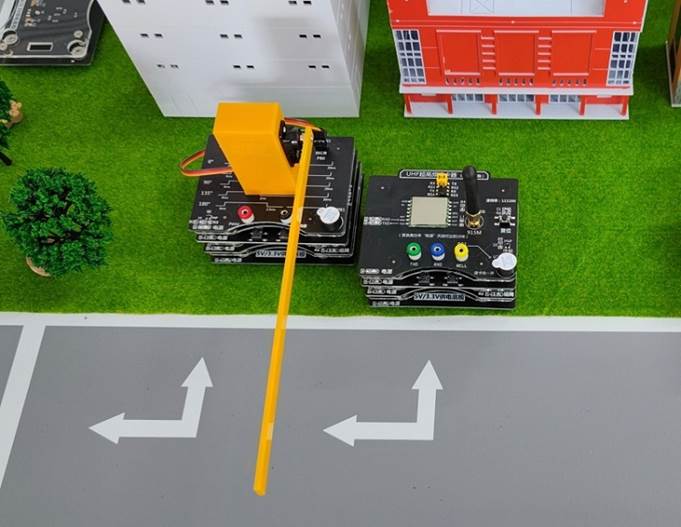
ETC�Ԅ�̧�Uϵ�y(t��ng)��915M���l�x�����Ͷ�C��(zh��)�����M�ɣ���С܇�?c��)�ETC��ڕr��915M���l�x�����R�eС܇�A(y��)�O(sh��)�ĸ��l��Ƭ���������l���_��ָ��ͨ�^ZigBee�W(w��ng)�j(lu��)��ݔ?sh��)���C��(zh��)�������ɶ�C��(zh��)��������Ԅ�̧�ͣ����z�y��С܇��(j��ng)�^���Ԅ��P(gu��n)�]���l��
8.���Эh(hu��n)����֪ϵ�y(t��ng)

���Эh(hu��n)����֪ϵ�y(t��ng)�ɶ����h(hu��n)����֪�������M�ɣ��������՚�؝�ȡ�������̼��ȡ����նȡ���ѩ���L(f��ng)�ٵȣ�����������ZigBee�o��ģ�K�M�нM�W(w��ng)����ͨ�^WiFi�W(w��ng)�P(gu��n)���h(hu��n)����������(sh��)��(j��)�ς����ƶˣ����F(xi��n)�ƶ˲ɼ���
9.���о���ϵ�y(t��ng)
���а���ϵ�y(t��ng)�ɶ�N�M�ɣ����������w�t������F��������t�⌦��ȣ�����ZigBee�o��ģ�K�M�нM�W(w��ng)����ͨ�^WiFi�W(w��ng)�P(gu��n)���h(hu��n)����������(sh��)��(j��)�ς����ƶˣ����F(xi��n)�ƶ˲ɼ���
10.AI܇���R�eϵ�y(t��ng)

AI܇���R�eϵ�y(t��ng)��Ҫ����AI�z���^�R�e���g(sh��)���ṩ���Ĕz���^ģ�M����Ļģ�M���ȿ��R�e܇�ƣ�Ҳ�����R�e���w��ͨ�^��С܇܇�Ƶ��R�e���Ȍ���(sh��)��(j��)�씵(sh��)��(j��)�����r�@ʾ�ɼ���܇��̖�a��Ϣ��Ҳ�������M��Python�����P(gu��n)�_�l(f��)�����F(xi��n)��ͬ�đ�(y��ng)�ù��ܣ�
11.܇�v��λϵ�y(t��ng)
��ɳ�P��·�·����A(y��)���˶������l��Ƭ��ͨ�^С܇��ɳ�P���\�У�С܇�ϵĵ��l�x�����xȡÿ����Ƭ��ͨ�^ÿ����Ƭ��ID��ͬ�����F(xi��n)С܇�ڸ�����ͬλ�õĶ�λ������ϵ�y(t��ng)��ͨ�^ZigBee�W(w��ng)�j(lu��)�M�Д�(sh��)��(j��)��ݔ����С܇λ����Ϣ�l(f��)������λ�Cܛ���ˣ����F(xi��n)ܛ���Ӯ��cС܇�\��܉�Eͬ����ͬ�rܛ��߀�߂��@ʾ�t�G����·����B(t��i)�Ĺ��ܣ�
�ġ�������Σ�
���ܽ�ͨ�̌W(xu��)��Ӗ(x��n)ɳ�P���Գ��е�·��ͨ����^(q��)��Ȧ��ԭ�ͣ��C���\�ßo����ݔ�W(w��ng)�j(lu��)����Ƭ�C��RFID���l�R�e���������c��������AI�˹����ܡ�늴Ō�(d��o)���{�����Z������Ӌ��ȼ��g(sh��)�����в����ڌ���ɳ�P�еĂ������c���������o��ͨ��ģ�M��RFIDģ�M�����܌�Ӗ(x��n)С܇�Լ����ܾW(w��ng)�P(gu��n)���O(sh��)�䣬���F(xi��n)���ܽ�ͨ�Ŀ����c�����������W(xu��)����Ϥ���ܽ�ͨϵ�y(t��ng)���P(gu��n)�Ŀ���_�l(f��)�c��(y��ng)�á�
���ܽ�ͨ�̌W(xu��)��Ӗ(x��n)ɳ�P�����ϵ�y(t��ng)�ṩ����(y��ng)�Ĉ����������в��Ì���(y��ng)���ܵĂ������c��(zh��)���������������ɼ�������Ϣͨ�^ZigBee�M�Ђ�ݔ������������(y��ng)��(zh��)������������(y��ng)��ʹ�����ܳ��С��Ԅ��{܇�vۙ��ETÇ�U���ơ����Эh(hu��n)���O(ji��n)�y������·�������П�����ơ���ͨ��ָʾ����(li��n)�W(w��ng)��Ӗ(x��n)����܇�����ܾW(w��ng)�P(gu��n)����(li��n)�W(w��ng)�Ʒ���(w��)����ϵ�y(t��ng)�ں���һ���γ�һ�����������ܽ�ͨģ�͡�
����ɳ�P���c��
���ܽ�ͨ�̌W(xu��)��Ӗ(x��n)ɳ�P��һ���ԾC�ό�Ӗ(x��n)�����Č���ɳ�P��ͨ�^����ͨ��·��·�����t�G�����O(ji��n)�ؔz����վ��ETÇ�U�Լ����ܳ��еȈ�����Y(ji��)�ϣ����F(xi��n)ͨ�^ɳ�P��(n��i)����(li��n)�W(w��ng)ģ�K����������С܇����ڽ�ͨɳ�P��(n��i)��ͬ�������\�У�������ܽ�ͨϵ�y(t��ng)�Č�Ӗ(x��n)��
u ���ܽ�ͨɳ�P���øߏ����X�Ͻ�Ǽܣ����γߴ�1.2m*1.2m*0.25m��
u ���ܽ�ͨɳ�P��������С܇������·��ϵ�y(t��ng)���t�G��ϵ�y(t��ng)�������Z������ϵ�y(t��ng)��������ϵ�y(t��ng)������ϵ�y(t��ng)���t�G��ϵ�y(t��ng)���Ԅ�̧�Uϵ�y(t��ng)�����П���ϵ�y(t��ng)��܇���R�e�Լ�܇�v��λϵ�y(t��ng)������ͨ�^ɳ�P��(n��i)���?z��i)��K�M�вɼ��Ϳ��ƣ�
u ���ܽ�ͨɳ�P����һ�wʽ��늽Y(ji��)��(g��u)������ɳ�Pֻ���B��һ���Դ�����ɣ�ͨ�^һ���Դ�����Ԟ�13·ģ�K��늣�ʡȥ���s�ĽӾ����������ڌW(xu��)��ʹ�ò�����
u ���ܽ�ͨɳ�P���漯��13�����?z��i)��K��ۣ����Ќ���۾����M�д���ʽ�B�ӣ����Ҽ��ɷ���·�O(sh��)Ӌ��֧��������ģ�K��(li��n)�ӌ����چ�֪�R�c�W(xu��)��(x��)�Ļ��A(ch��)�ϣ��M�ж�ģ�K�C�ϑ�(y��ng)�Ì�����ɟo�����оW(w��ng)�j(lu��)���ȶ�N��(f��)�s��(li��n)�W(w��ng)��
u ���ܽ�ͨɳ�P��(n��i)������c��(li��n)�W(w��ng)ģ�K�װ��B�ӣ���ͨ�^��(li��n)�W(w��ng)ģ�Kֱ�ӿ������ܽ�ͨ�ğ���ͣ����a�_Դ��֧�ֶ����_�l(f��)��
u �ṩNewIOT��(li��n)�W(w��ng)���ƽ�_�����ڌ���{(di��o)ԇ�����P(gu��n)��(li��n)�W(w��ng)ģ�K���A(ch��)����
����ɳ�Pϵ�y(t��ng)��
1.����С܇
���܌�Ӗ(x��n)С܇����STM32������̎������С܇���d�ķN��ͬ���\�������Ɍ��F(xi��n)�t�⌤�E��늴Ō��E���t������Լ����ƹ��ܣ�֧�ִ�����eľ���B�ӷ�ʽ���ɴ��䲻ͬ��ģ�K���F(xi��n)��ͬ��Ӗ(x��n)���ܣ�С܇߀����RFID���l�R�eģ�K��ZigBeeͨ��ģ�K�����l��Ƭ�Լ�܇��̖��Ƭ�ȣ��ṩ�_�ŵ�Դ���a�͌�����̡�
2.���ܾW(w��ng)�P(gu��n)�͟o����ݔϵ�y(t��ng)
���ܾW(w��ng)�P(gu��n)����ZigBee��WiFi���p�W(w��ng)�P(gu��n)������ϵ�y(t��ng)�ĵӲ���ZigBee���g(sh��)�M�Пo����ݔ������ZigBee�W(w��ng)�P(gu��n)ؓ؟(z��)�B�Ӿ���W(w��ng)����WiFi�W(w��ng)�P(gu��n)ؓ؟(z��)���ɼ��Ă�������Ϣ��ݔ����ƽ�_�ˣ����F(xi��n)�ƶ��@ʾ�Ϳ��ƣ�
3.�����Z������ϵ�y(t��ng)
���������Z������ģ�K��125k���l���x����������(n��i)��125k�x������С܇��(j��ng)�^���xȡ���A(y��)���ڹ���վ�Եĵ��l��Ƭ�r��С܇�R�e��Ƭ��(sh��)��(j��)����������վָ��ͨ�^ZigBee�W(w��ng)�j(lu��)��ݔ?sh��)��Z������ģ�K�ϣ��˕rС܇ֹͣ��������վ��Ϣ�����ӕr�Y(ji��)������С܇������Ϣ��С܇�Ԅӆ��ӣ����F(xi��n)ģ�M�����Ĉ�վ���Ԅӆ�ͣ��
4.����·��ϵ�y(t��ng)
����·��ϵ�y(t��ng)��Ҫ��ģ�M·�����^����������͵��l�x�����M�ɣ�ÿ··���c�^����B�ӣ�С܇�\�Еr�R�e�A(y��)���ڵ�·�µĵ��l��Ƭ����ͨ�^ZigBee�o�����оW(w��ng)�l(f��)���^����_�����P(gu��n)�]��ָ�(li��n)���^����M��·�����Ԅ��_�ϣ��Ķ����F(xi��n)����·������܇���ėl·���ėl·��·�������𣬹�(ji��)�s��Դ��
5.���П���ϵ�y(t��ng)
���П���ϵ�y(t��ng)�ɹ��նȂ��������^�����(zh��)�����Լ���(n��i)���ڽ������(n��i)��LED���M�ɣ����h(hu��n)�����Ƚ��͕r���_���A(y��)�O(sh��)���R��ֵ�r������������Ԅ��������Ȼ֏�(f��)�������������Ԅ�Ϩ�磻
6.��ͨ��̖��ϵ�y(t��ng)
��ͨ��̖��ϵ�y(t��ng)�ɼt�G��ģ�K���t�⌦��ģ�K��������ģ�K�M�ɣ�ͨ�^�������ͽ�ͨ��̖���ąf(xi��)�{(di��o)��ϣ����F(xi��n)С܇�Ԅӆ�ͣ�����˱�����С܇��(j��ng)�^�M�뵽�t�G��·�ڣ����|�l(f��)���������t�G��ģ�K���˕r��̖���Ġ�B(t��i)ͨ�^ZigBee�W(w��ng)�j(lu��)�l(f��)�ͽoС܇��С܇������Ϣ��(zh��)������(y��ng)������
7.ETC�Ԅ�̧�Uϵ�y(t��ng)
ETC�Ԅ�̧�Uϵ�y(t��ng)��915M���l�x�����Ͷ�C��(zh��)�����M�ɣ���С܇�?c��)�ETC��ڕr��915M���l�x�����R�eС܇�A(y��)�O(sh��)�ĸ��l��Ƭ���������l���_��ָ��ͨ�^ZigBee�W(w��ng)�j(lu��)��ݔ?sh��)���C��(zh��)�������ɶ�C��(zh��)��������Ԅ�̧�ͣ����z�y��С܇��(j��ng)�^���Ԅ��P(gu��n)�]���l��
8.���Эh(hu��n)����֪ϵ�y(t��ng)
���Эh(hu��n)����֪ϵ�y(t��ng)�ɶ����h(hu��n)����֪�������M�ɣ��������՚�؝�ȡ�������̼��ȡ����նȡ���ѩ���L(f��ng)�ٵȣ�����������ZigBee�o��ģ�K�M�нM�W(w��ng)����ͨ�^WiFi�W(w��ng)�P(gu��n)���h(hu��n)����������(sh��)��(j��)�ς����ƶˣ����F(xi��n)�ƶ˲ɼ���
9.���о���ϵ�y(t��ng)
���а���ϵ�y(t��ng)�ɶ�N�M�ɣ����������w�t������F��������t�⌦��ȣ�����ZigBee�o��ģ�K�M�нM�W(w��ng)����ͨ�^WiFi�W(w��ng)�P(gu��n)���h(hu��n)����������(sh��)��(j��)�ς����ƶˣ����F(xi��n)�ƶ˲ɼ���
10.AI܇���R�eϵ�y(t��ng)
AI܇���R�eϵ�y(t��ng)��Ҫ����AI�z���^�R�e���g(sh��)���ṩ���Ĕz���^ģ�M����Ļģ�M���ȿ��R�e܇�ƣ�Ҳ�����R�e���w��ͨ�^��С܇܇�Ƶ��R�e���Ȍ���(sh��)��(j��)�씵(sh��)��(j��)�����r�@ʾ�ɼ���܇��̖�a��Ϣ��Ҳ�������M��Python�����P(gu��n)�_�l(f��)�����F(xi��n)��ͬ�đ�(y��ng)�ù��ܣ�
11.܇�v��λϵ�y(t��ng)
��ɳ�P��·�·����A(y��)���˶������l��Ƭ��ͨ�^С܇��ɳ�P���\�У�С܇�ϵĵ��l�x�����xȡÿ����Ƭ��ͨ�^ÿ����Ƭ��ID��ͬ�����F(xi��n)С܇�ڸ�����ͬλ�õĶ�λ������ϵ�y(t��ng)��ͨ�^ZigBee�W(w��ng)�j(lu��)�M�Д�(sh��)��(j��)��ݔ����С܇λ����Ϣ�l(f��)������λ�Cܛ���ˣ����F(xi��n)ܛ���Ӯ��cС܇�\��܉�Eͬ����ͬ�rܛ��߀�߂��@ʾ�t�G����·����B(t��i)�Ĺ��ܣ�
�ġ�������Σ�
| ��̖ | �Ŀ | ���Q | ��(sh��)�� | ��ע |
| 1 | ɳ�P | ���ܽ�ͨ��Ӗ(x��n)ɳ�P | 1 | 1.2m*1.2m*0.25m |
| 2 | �{(di��o)ԇƽ�_ | ��(li��n)�W(w��ng)���ƽ�_ | 1 | һ�w�����ƽ�_ |
| 3 | ��늵װ� | 3.3V/5V��늵װ� | 13 | ֧�ִ�����eľ |
| 4 | ��Ƭ�C | Ƕ��ʽSTM32ģ�K | 13 | ֧�ִ�����eľ |
| 5 | �o��ͨӍ | ZigBee�o��ͨ��ģ�K | 13 | ֧�ִ�����eľ |
| WIFI�o��ͨ��ģ�K | 1 | ֧�ִ�����eľ | ||
| 6 | ���l�R�e | UHF�����lģ�K(915M) | 1 | ���쾀�͘˺� |
| LF���lģ�K��125k�� | 1 | ����С܇��(n��i)�� | ||
| 7 | ������ | �՚�؝�Ȃ����� | 1 | ֧�ִ�����eľ |
| ���Ղ����� | 1 | ֧�ִ�����eľ | ||
| ���w�t������� | 1 | ֧�ִ�����eľ | ||
| ���w������ | 1 | ֧�ִ�����eľ | ||
| ����?zh��n)����?/span> | 1 | ֧�ִ�����eľ | ||
| �t�⌦������� | 1 | ֧�ִ�����eľ | ||
| ��̖�ɼ������� | 1 | ֧�ִ�����eľ | ||
| 8 | ��(zh��)�п����� | �p·�^�����(zh��)���� | 3 | ֧�ִ�����eľ |
| ��C��(zh��)���� | 1 | ֧�ִ�����eľ | ||
| �L(f��ng)��ģ�K | 1 | ֧�ִ�����eľ | ||
| �Z������ģ�K | 1 | ֧�ִ�����eľ | ||
| LED�t�G��ģ�K | 1 | ֧�ִ�����eľ | ||
| 9 | ����С܇ | ����С܇ | 1 | ֧�ִ�����eľ |
| ����С܇̎����ģ�K | 1 | ֧�ִ�����eľ | ||
| �Ԅ��{���ײ�A(y��)�������� | 1 | ֧�ִ�����eľ | ||
| �Ԅ��{����Ѳ�������� | 1 | ֧�ִ�����eľ | ||
| �Ԅ��{�t��Ѳ�������� | 1 | ֧�ִ�����eľ | ||
| AI�z���R�eģ�K | 1 | ֧�ִ�����eľ | ||
| 10 | ��ƽ�_ | ������ƽ�_ | 1 | ֧������ |
�塢Ӳ������(sh��)��
| ���ܽ�ͨ��Ӗ(x��n)ɳ�P����(sh��) | |||
| ��̖ | ���Q | ����(sh��) | �DƬ |
| 1 | ���ܽ�ͨ��Ӗ(x��n)ɳ�P |
l �����X�Ͻ�Ǽܣ��ߴ�1.2m*1.2m*0.25m�� l ����5V-12V��ȫ늉����ṩ1·�Դ���_�P(gu��n)�� l ��(n��i)���ǻ۳����c���ܽ�ͨɳ�Pģ�ͣ�֧���ǻ�·��������С܇�����П��⡢�����Z������ͨ��̖����ETC�Ԅ�̧�U��܇���R�e��܇�v��λ����ͨ��̖�����������c����ϵ�y(t��ng)�� l �ṩzigbee��wifi�W(w��ng)�P(gu��n)��֧�֟o�����оW(w��ng)�Ͷ�W(w��ng)�j(lu��)�ںϣ� l �ṩ13·����ģ�K�B�Ӱ壬֧����(li��n)�W(w��ng)ģ�K������eľ�B�ӣ�����֧��3��ģ�K�B�ӣ� l �ṩ8·�Ӿ����������ڽӾ��B�ӣ� l ֧����ƽ�_ϵ�y(t��ng)�� |
 |
| 2 | ��(li��n)�W(w��ng)���ƽ�_ |
l ���^�ߴ磺�L415*��310*��50��mm�������|(zh��)���X�Ͻ�Ш�νY(ji��)��(g��u)�� l ���ƽ�_����һ�wʽ��늽Y(ji��)��(g��u)����������^��ֻ���B��һ���Դ���͔�(sh��)��(j��)�����ɡ� l ����ȫ�µĽ̌W(xu��)ģʽ�������eľʽ�̌W(xu��)������ģ�K�����M�ЯB�_�hʽ(��eľ)�ĽM�b�B�ӣ�֧�ֶ���ģ�K�B�ӣ��o���┵(sh��)��(j��)���c�Դ���� l �ṩ5V��늽ӿڣ�Type-C������̫�W(w��ng)�ӿڡ��p·USB�ӿڡ�J-link���d���ӿڡ�CC-Debugger���d���ӿڡ�RS232/RS485���ڣ�����J-link���d����CC-Debugger���d������ƽ�_��(n��i)�ã����d����rֻ�茢ģ�K������ƽ�_����(y��ng)���d�˼��ɣ��o��Ӿ��� l ��(n��i)��USB���ڷ���(w��)�O(sh��)��,ͨ�^1·USB̓�M����·���ڣ�����(j��)�˿�̓�M����ͬ�Ĵ��ڣ�������չ8·���ڽӿڣ����а�����ͨTTL����4·��485����4·�� l ���ƽ�_�߂�8��ͨ�Ì��?z��i)��K��ۣ�ÿ����ۼ���12·���|�c����ģ�K�M�Д�(sh��)��(j��)ͨӍ����늣����Ҳ�ۼ��ɷ���·���ܣ���ֱ�ӌ�ģ�K��������ۃ�(n��i),֧�����8��ģ�K(li��n)�ӌ� l ���ƽ�_�ϼ�����485�x���I��ZigBee��������(f��)λ�I��J-Link�����������I��̓�M�x�������I����ʹ�ò�ͬ���ܵĕr�����ГQ��ʹ�ã�ͬ�r��Ӗ(x��n)ƽ�_��(n��i)������߀ԭ����ģ�K����ͨӍ�������{(di��o)ԇ���F(xi��n)��y�r��ֻ���P(gu��n)�]�Դ���؆������ɻ֏�(f��)���S�O(sh��)�ã� |
 |
| 3 | 3.3v/5v��늵װ� |
l �ṩ3.3v/5v����|�c�����ό�ģ�K�M�г��m(x��)��늣� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
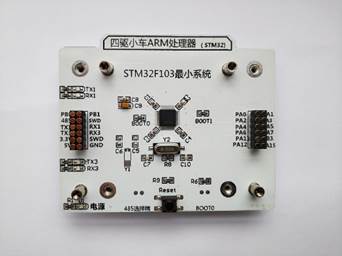
| 4 | Ƕ��ʽSTM32̎���� |
l ����STM32F103̎��������(n��i)�ˣ�ARM 32λ��Cortex™-M3 CPU�����72MHz�����l�ʣ��ڴ惦����0�ȴ������L���r���_1.25DMips/MHz (Dhrystone 2.1)�� l �惦���� l ��16K��32K�ֹ�(ji��)���W�����惦���� l ��6K��10K�ֹ�(ji��)��SRAM�� l ֧��USB��CAN��6�����r����2��ADC ��6��ͨ�Žӿڣ� l �ṩ485�x��ˡ�BOOT0��·�ӿڣ��ṩ1����(f��)λ�I�� l �������d��ʽ�錍�ƽ�_��(n��i)�����d�����o��ⲿ�Ӿ�����(ji��)ʡ�Ӿ������r�g�������Դ���o�·�� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 5 | ZigBee�o��ͨ��ģ�K |
l ��оƬ��CC2530F256��256K Flash��8K RAM����(n��i)��8051��Ƭ�C���o���հl(f��)����֧��11-26�ŵ����ģ�֧���c�����M�����V����N��͔�(sh��)��(j��)ͨ�ţ�֧���ԄӽM�W(w��ng)���W(w��ng)�j(lu��)�������ܣ� l �������ʣ�9600-115200bps��N���ʿ��x�� l �o���l�ʣ�2.4GHz�� l �o���f(xi��)�h��ZigBee2007/PRO�� l ͨӍ�ӿڣ�UART�� l �o�ϵK��ݔ���x��200�ף� l ���ɴ����ГQ���ܣ�ͨ�^������ʽ���Ɍ�ͨӍ��·�M���ГQ�� l �߂�f(xi��)�{(di��o)����·�������K�˹��ܣ���ͨ�^����ָ���O(sh��)�������N����������ГQ�� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 6 | Wifi�o��ͨ��ģ�K |
l ��оƬ����MAC�����lоƬ�����l�հl(f��)��Ԫ����(n��i)�õ����\�ЙC�ƣ�������Ч�Ľ������\�У� l ֧��WiFi@2.4GHz802.11b/g/n�o���˜ʣ� l ֧��WEP/WPA-PSK/WPA2-PSK��ȫģʽ�� l ֧��AP��STA��AP+STA����ģʽ�� l ��ȫ���ɵĴ����D(zhu��n)�o��TCP/UDP��ݔ���ܣ��������������x�� l ֧��TCP/UDPClientע���C�ƣ� l ֧��SimpleConfig/Airkiss/usrlink����(li��n)�W(w��ng)���ã� l ֧��AT+ָ����ã� l ���ɴ����ГQ���ܣ�ͨ�^������ʽ���Ɍ�ͨӍ��·�M���ГQ�� l ͨ�^����(sh��)���ã���ͨ�^WiFi�o����(ji��)�c������������(sh��)��(j��)�����ƶˣ� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 7 | UHF�����lģ�K |
l �����l�ʣ�915MHz�� l ����x�����x��10M�� l �����մ��쾀������10DBi,�����50W�� l ģ�K���ó����lRFID����оƬģ�M�·�����MDSP���g(sh��)�� l ֧��EPCC1/GEN2/ISO18000-6C�cISO 18000-6B���f(xi��)�h�� l ܛ�����{(di��o)ݔ������10dBm~27dBm�� l ȫ��֧�և��H���ó����lRFID�˜ʣ��������дa�ʺ;��a�x헣� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
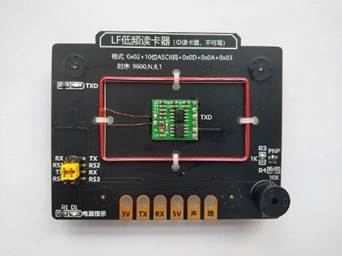
| 8 | LF���lģ�K |
l �����l�ʣ�125Khz��134.2KHz�� l �ǽ��|ʽIC���x�����IJ����������ݡ����㣬�x���ٶȿ�����x�����x���_10CM�� l ����ISO11784/85�˜��O(sh��)Ӌ�� l ֧��TK4100,GK4100,EM4100�������оƬ�� l ֧��TEMIC 5557,ATA5567,ATA5577�� l ֧��hitag-s�� l ֧��EM4469,EM4302,EM4305�� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
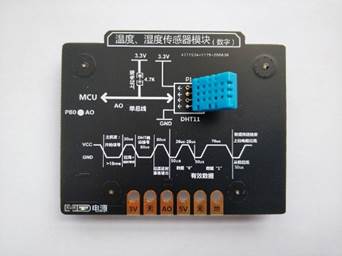
| 9 | �՚�؝�Ȃ����� |
l ����DHT11�������� l �ضȣ��z�y����0-50�ȣ����_�������_��0.5�棻 l ��ȣ� l �z�y����20%RH-95%RH, ���_�������_��2%RH�� l ֧������͝�Ȃ��Ќ� l ֧�֝��ֵ�}�_��̖ݔ���� l ݔ����ʽ����(sh��)������ l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 10 | ���նȂ����� |
l ����ROHMԭ�bBH1750FVIоƬ�� l ݔ����ʽ:��(sh��)������ģ�M���� l ʹ�Ì�늉�LM393늉����^��,������(w��n)���� l ���նȷ�����0-65535lx l ��������(n��i)��16bitAD�D(zhu��n)�Q����ֱ�Ӕ�(sh��)��ݔ����ʡ�ԏ�(f��)�s��Ӌ�㣬ʡ�Ԙ˶������^(q��)�֭h(hu��n)����Դ���ӽ���ҕ�X�`���ȵķֹ����ԣ��Ɍ��V���������M��1�տ�˹�ĸ߾��Ȝy���� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 11 | ���w�t������� |
l ����SR602�Б�(y��ng)�������� l �Б�(y��ng)���x��0-5M�� l ֧�ּt�⌦�䡢�t����������Ќ� l ͬ�r�ṩ��������ģ�M����̖�� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 12 | ���w������ |
l ���ÿɲ�ж�Y(ji��)��(g��u)��֧��MQϵ�а댧(d��o)�w����Ԫ���� l ֧��1·��(sh��)����ݔ���� l ֧��1·ģ�M��ADݔ�����ܣ� l ֧���`���ȿ��{(di��o)�� l �z�y��ȣ�300-10000ppm�� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 13 | ����?zh��n)����?/span> |
l ̽�y�Ƕȣ�60°�� l �z�y���L��760nm-1100nm�� l ݔ����ʽ���_�P(gu��n)���� l ֧���`���ȿ��{(di��o)�� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 14 | �t�⌦������� |
l ����H2010ֱ����늂��������ی�10mm�� l ʹ�Ì�늉�LM393늉����^��,������(w��n)���� l ������̖ݔ��ָʾ����ݔ�����ƽ���磬ݔ�����ƽ������ l ݔ����ʽ���_�P(gu��n)���� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 15 | ��̖�ɼ��� |
l ���ù��I(y��)���a(ch��n)�ęCе��λ������λ�����|�l(f��)������x����ƽݔ�����ߵ��ƽݔ����ʽ�� l �ṩ�p·��λ����֧������O(sh��)����ƣ� l �ṩNO��COM��NC��·ݔ���ˣ� l ����ģ�MһЩ���I(y��)���������|�l(f��)�ɼ�����t��řڡ����w�t��ȣ� l ݔ����ʽ���_�P(gu��n)���� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 16 | �p·�^�����(zh��)���� |
l ����5V�����^��������F(xi��n)�p·�����_�P(gu��n)�� l �^���Ҏ(gu��)��3A-200VAC��3A-30VDC�� l �ṩNO��COM��NC��·ݔ���ˣ�����ӿ����O(sh��)�䣻 l �ṩ�p·ָʾ�����@ʾ�^�����B(t��i)�� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 17 | ��C��(zh��)���� |
l ���Æ�·��C��������ͨ�^����C�Ŀ��ƌ��F(xi��n)�����_�������D(zhu��n)�ӣ� l ����Ť��1.6kg/cm�� l �D(zhu��n)���ٶȣ�0.12-0.13��/60°�� l ����PMW��̖�M�Ђ�ݔ�� l ��C�\�D(zhu��n)�Ƕȣ�0-360°�� l ��ͨ�^��Ƭ�C���̣����F(xi��n)��C�����\�D(zhu��n)�� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 18 | �L(f��ng)��ģ�K |
l �ṩ1·ֱ���L(f��ng)��ģ�K���ṩ��Ƭ�C������·�ɷN���Ʒ�ʽ�� l ���������0.09-0.25A�� l �D(zhu��n)�٣�2000RPM�� l �L(f��ng)����2.37CFM�� l ��ͨ�^����Ƭ�C���̌��F(xi��n)�_�P(gu��n)���ƣ� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 19 | �Z������ģ�K |
l �ṩ3W/4Ω�Z���������ȣ� l ֧��MP3��WAV��a��ʽ�� l ֧�ֲɘ��ʣ�Khz����8/11.025/12/16/22.05/24/32/44.1/48�� l ���d32Mbit��4MByte��flash�惦����ͨ�^USB�B�Ӹ������l�ļ��� l �ṩ“ͨ��ƽ�_”����̽ᘽ��|�c�����ڳ������d�������{(di��o)ԇ����늵����á��ṩ��eľ���Խ��|ᘣ����ڴ�eľ��ʽ�̌W(xu��)�� |
 |
| 20 | LED�t�G��ģ�K |
l ����늉���5V�� l �ṩ�t�S�G3·LED�����c����С܇���ʹ�ã��Ɍ��F(xi��n)��ģ�M�t�G�����ܣ��t��ͣ���G���У� l ���ɔ�(sh��)�a�ܣ����r�@ʾ�t�G����Ӌ�r�� l ͨ�^����Ƭ�C���̣��Ɍ��F(xi��n)������r�g���Ƽ���Ӌ�r�ȹ��ܣ� |
 |
| 21 | ����С܇ |
l ����4�������Ĝp��늙C���ƣ���̖GA12-N20 ���~��ؓ�d200g.cm�� l ���d7.4V�������늳أ�늳�����3000 mA�������Դ�_�P(gu��n)��늳ر��o���ܣ�����������@ʾģ�M�����r�@ʾ늳������ l С܇���壨܇�������漯��24·���Բ�ᘽ��|�c��֧�ִ�eľ�̌W(xu��)��ʽ����ͨ�^�����B�ӷ�ʽ�c��ͬ��ģ�K�M���B�ӣ����F(xi��n)��ͬ���ܣ� l �ṩС܇̎����ģ�K������STM32F103C8T6̎����оƬ�����cС܇�����M�д����B�ӣ� l �ṩ���N��ͬ�\��ģʽӲ����ͨ�^�cС܇����ײ����ɵ�10·ACC���܌��E�ӿںʹ������|�c�M���B�ӣ��Ɍ��F(xi��n)�t������Ԅ��{�t��Ѳ���Ԅ��{����Ѳ���Ԅ��{�?c��)��N���ܣ� l ֧���ƶ˼����Cܛ���˿��ƣ� |
 |
| 22 | ����С܇̎����ģ�K |
l ����STM32F103C8T6̎����оƬ��֧�ֳ������d���ģ����M�ж����_�l(f��)�� l �ṩ485�x��˺�BOOT0��ᘣ� l �ṩ1·��(f��)λ���I�� l �ṩTX1��RX1��TX3��RX3��·��(sh��)��(j��)�հl(f��)ָʾ���� |
 |
| 23 | �Ԅ��{���ײ�A(y��)�� ������ |
l ����ģ�K���O(sh��)Ӌ��֧���c����С܇�M�д����B�ӣ������ж�� l �ṩ4·�����ļt���հl(f��)̽�^���ɏ�4����ͬ�����M�б��ϣ��p�����ǣ� l �`���ȿ��{(di��o)��ͨ�^�λ���{(di��o)��(ji��)�����O(sh��)��ˮƽ����2-30cm�Б�(y��ng)���x�� l �ṩ�����p·����ָʾ�������z�y���ϵK��r������ָʾ������С܇�����D(zhu��n)�ӣ� l ʹ�Ì�늉�LM393늉����^��,������(w��n)���� |
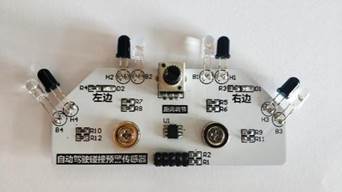 |
| 24 | �Ԅ��{����Ѳ�� ������ |
l ����ģ�K���O(sh��)Ӌ��֧���c����С܇�M�д����B�ӣ������ж�� l �ṩ4·������TCRT5000��늂�����ģ�M��̽�y��e������ѭ�E�� l �`���ȿ��{(di��o)��ͨ�^�λ���{(di��o)��(ji��)�����O(sh��)�þ����1mm-8mm�Б�(y��ng)���x�� l ÿ��TCRT5000��늂�����ģ�M����(y��ng)1·��B(t��i)ָʾ���������������|�l(f��)�r��ָʾ��Ϩ�磻 |
 |
| 25 | �Ԅ��{�t��Ѳ�� ������ |
l ����ģ�K���O(sh��)Ӌ��֧���c����С܇�M�д����B�ӣ������ж�� l �ṩ4·������늸�Ԫ����1·�λ�{(di��o)��(ji��)�������{(di��o)��(ji��)늴ŸБ�(y��ng)�`���ȣ�늸�����10uH�� l �ṩ3·�����ļt���հl(f��)̽�^��1·�λ�{(di��o)��(ji��)�������{(di��o)��(ji��)�t��Б�(y��ng)���x�� l �ṩ6·��������B(t��i)ָʾ�������r�@ʾ�������|�l(f��)��B(t��i)�� l ʹ�Ì�늉�LM393늉����^��,������(w��n)���� |
 |
| 26 | AI�z���R�eģ�K |
l �����˹�����AI����ģ�M����(n��i)�ó����㷨ģ�ͣ�֧�ֶ��_48��GPIO��16������IO�ӿڣ� l �ṩ2.4��LCD�@ʾ�����ֱ���240*320���ӿ�24PIN�� l �ṩ1·200�f����z���^ģ�M��֧�����1632*1232�ֱ��ʣ� l ֧����չTF���� l ͨ�^�����㷨���M��܇���R�e�����r�����@ʾ���D���R�e�ȹ��ܣ� |
 |
| 27 | ������ƽ�_ |
l ֧�ւ��y(t��ng)���I(y��)���ƣ���ͨ�^��NͨӍ��ʽ����: 5G��NB-IOT����4G��GPRS��2.5G���� Lora�� WiFi�ȣ������I(y��)�ς��y(t��ng)Ӳ���������̌W(xu��)������ģ�K�������ƶˣ����F(xi��n)�����I(y��)���a(ch��n)�h(hu��n)����(sh��)��(j��)��ȫ��O(ji��n)�أ� l Modbus�f(xi��)�h�����ù��I(y��)�ϳ��õ�Modbus�f(xi��)�h���Ɍ����I(y��)���e��������ȫ��ֲ���̌W(xu��)���`�У����ṩԴ���a���W(xu��)��������c�����܉�� l ����ͨ�^wifi��4g��nb-iot�o��ģ�K������������(sh��)��(j��)ֱ�Ӳɼ����ƶ��@ʾ�� l ֧���ƽM�B(t��i)�O(sh��)�ã� l ֧���֙C���Ղ���������Ϣ�� l ֧����С�����@ʾ�M�B(t��i)��(n��i)�ݣ��������O(sh��)��ȹ��ܣ� |
 |
������Ӗ(x��n)�Ŀ��
ͨ�^���������?z��i)��K�c��Ӗ(x��n)ɳ�P��Y(ji��)�ϣ����M�ж�N��Ӗ(x��n)��
ͨ�^���������?z��i)��K�c��Ӗ(x��n)ɳ�P��Y(ji��)�ϣ����M�ж�N��Ӗ(x��n)��
| ���ܽ�ͨɳ�P��Ӗ(x��n)�Ŀ | |
| ���1������С܇Ѳ����� | ���9.܇���R�e��� |
| ���2��125k���l�x����� | ���10.���նȲɼ���� |
| ���3������������ƌ�� | ���11.�؝�Ȳɼ���� |
| ���4.�����Z������� | ���12.����С܇��λ��� |
| ���5.ETC�Ԅ�̧�U��� | ���13.��ƽ�_�ɼ����ƌ�� |
| ���6.915M�����l�x����� | ���14.ZigBee�o�����оW(w��ng)��� |
| ���7.����·���\�п��ƌ�� | ���15.����С܇�����Ԅӱ���� |
| ���8.����С܇����վ�Ԅӆ�ͣ��� | ���16.����С܇�t�G���Ԅӆ�ͣ���... |
������ṩ�_Դ�Č����a���������ġ����g���a��֧�ֶ����_�l(f��)���ɸ���(j��)���ϻ��A(ch��)��������չ�������ܽ�ͨ�����F(xi��n)��ͨϵ�y(t��ng)���_�l(f��)�c��(y��ng)�ã�